Auteur : Claire DUNE
26 avril 2019 : Soutenance de Thèse de Matheus LARANJEIRA
« Asservissements visuels sur des objets déformables : une application au control d’ombilicaux sous-marins »

« Cette thèse porte sur le problème du contrôle de la forme d’ombilicaux pour des petits robots sous-marins télécommandés (mini-ROVs), qui conviennent, grâce à leur petite taille et grande manoeuvrabilité, à l’exploration des eaux peu profondes et des espaces encombrés. La régulation de la forme de l’ombilical est cependant une tâche difficile, car ces robots n’ont pas une puissance de propulsion suffisante pour contrebalancer les forces de traînée du câble. Pour faire face à ce problème, nous avons introduit le concept de Cordée de mini-ROVs, dans lequel plusieurs robots sont reliés à l’ombilical et peuvent, ensemble, contrebalancer les perturbations extérieures et contrôler la forme du câble.

25.04.2019 : Séminaire de David Navarro Alarcon
 Titre
Titre
Asservissement de forme d’objets déformables : Modélisation, estimation et contrôle
Résumé
Au cours des dernières années, on s’est intéressé de plus en plus à la conception de méthodes guidées par capteurs pour contrôler la forme d’objets déformables à l’aide de manipulateurs robotisés. Ce problème de contrôle de forme a de nombreuses applications potentielles dans des domaines en pleine croissance tels que la robotique chirurgicale, la transformation alimentaire automatisée, l’industrie du vêtement, la robotique domestique, etc. J’appelle ces types de tâches de rétroaction l’asservissement de forme (visuelle), une approche qui contraste avec l’asservissement visuel standard (œil en main) – à la Chaumette – en ce sens que le servo-loop est formulé en fonction de la forme déformable de l’objet et non en fonction de la pose rigide du robot/de l’objet.
Mon objectif dans cet exposé est de présenter la formulation de base de ce nouveau type de tâches de manipulation guidée par capteur. Pour faire face à ce problème de manipulation difficile (et toujours ouvert), nous avons développé ces dernières années une nouvelle méthodologie basée sur la vision qui nous permet de : caractériser la forme de l’objet dimensionnel infini avec un vecteur compact de paramètres de rétroaction, estimer/approximer en ligne les propriétés de déformation d’un corps mou manipulé inconnu, et contrôler explicitement la forme/déformation de l’objet par un robot actif. Je vais vous présenter nos travaux récents sur ce problème. Des exemples de nos méthodes, algorithmes et estimateurs basés sur la vision seront démontrés ; des problèmes ouverts, des défis et des opportunités seront également discutés.
Bio
David Navarro-Alarcon est professeur adjoint (Robotique) au Département de génie mécanique de l’Université polytechnique de Hong Kong (PolyU) et chercheur principal du Robotics and Machine Intelligence Laboratory. Avant de rejoindre PolyU en juillet 2017, il a travaillé au CUHK T Stone Robotics Institute de 2014 à 2017, d’abord comme boursier postdoctoral, puis comme professeur assistant de recherche. Ses intérêts de recherche comprennent le génie robotique, l’intelligence des machines, les systèmes adaptatifs et la théorie du contrôle. Il a obtenu son doctorat en janvier 2014 à l’Université chinoise de Hong Kong sous la supervision du professeur Yun-hui Liu. David est membre de l’IEEE, de la Robotics and Automation Society et de la Computational Intelligence Society.
Le séminaire sera retransmis en direct au LIS, site de Marseille.
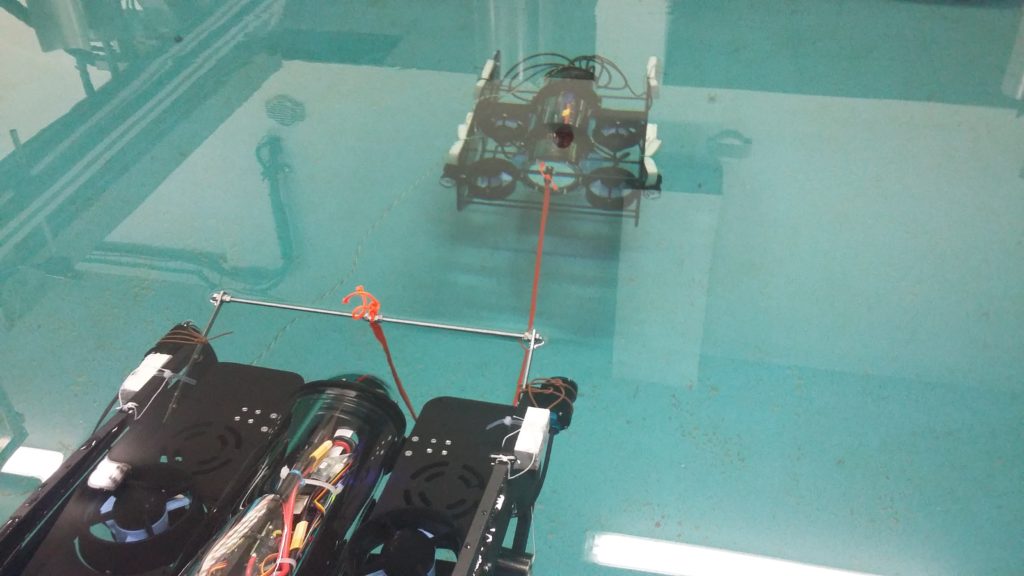
Test de la cordée de robot en bassin
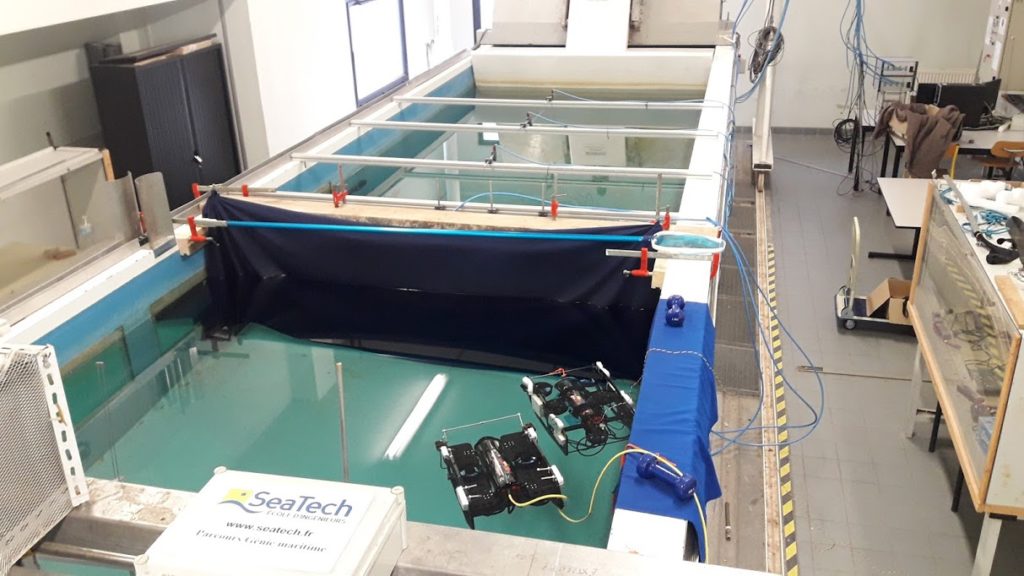
Cette semaine, les BlueRovs sont à l’eau au bassin à houle de SeaTech pour une série de tests du concept de cordée de robots.
7 mars 2019 La recherche fait son show, saison 2
Cette année encore, l’Université de Toulon vous invite au théâtre liberté pour une soirée évènement autour des activités de recherche des doctorants et des jeunes chercheurs . 12 doctorants et 7 chercheurs vont se plier à un exercice périlleux : présenter leurs recherches en un temps limité de manière théâtrale et imagée à destination de tout public.
Le laboratoire COSMER sera représenté par Ornella Tortorici et Mathieu Richier. Venez nombreux les soutenir !
31 janvier 2019 – Séminaire Benjamin OSTRE

27èmes journées Manufacturing’21 du 23 au 25 janvier
Cosmer aux Journées Nationales du GdR Robotique 2018
Mathieu Richier représentera la laboratoire COSMER lors des Journées Nationales du GdR Robotique se tiendront à Paris les 21 et 22 Novembre 2018 au siège du CNRS, 3 rue Michel-Ange – 75794 Paris. Ces Journées sont organisées tous les deux ans alternativement avec les JNRR. Cette année 9 keynotes sont invités pour nous présenter une vision large des activités de recherche en robotique. les responsables des groupes de travail feront également une présentation technique dans chacun des domaines incluant des perspectives scientfiques.
