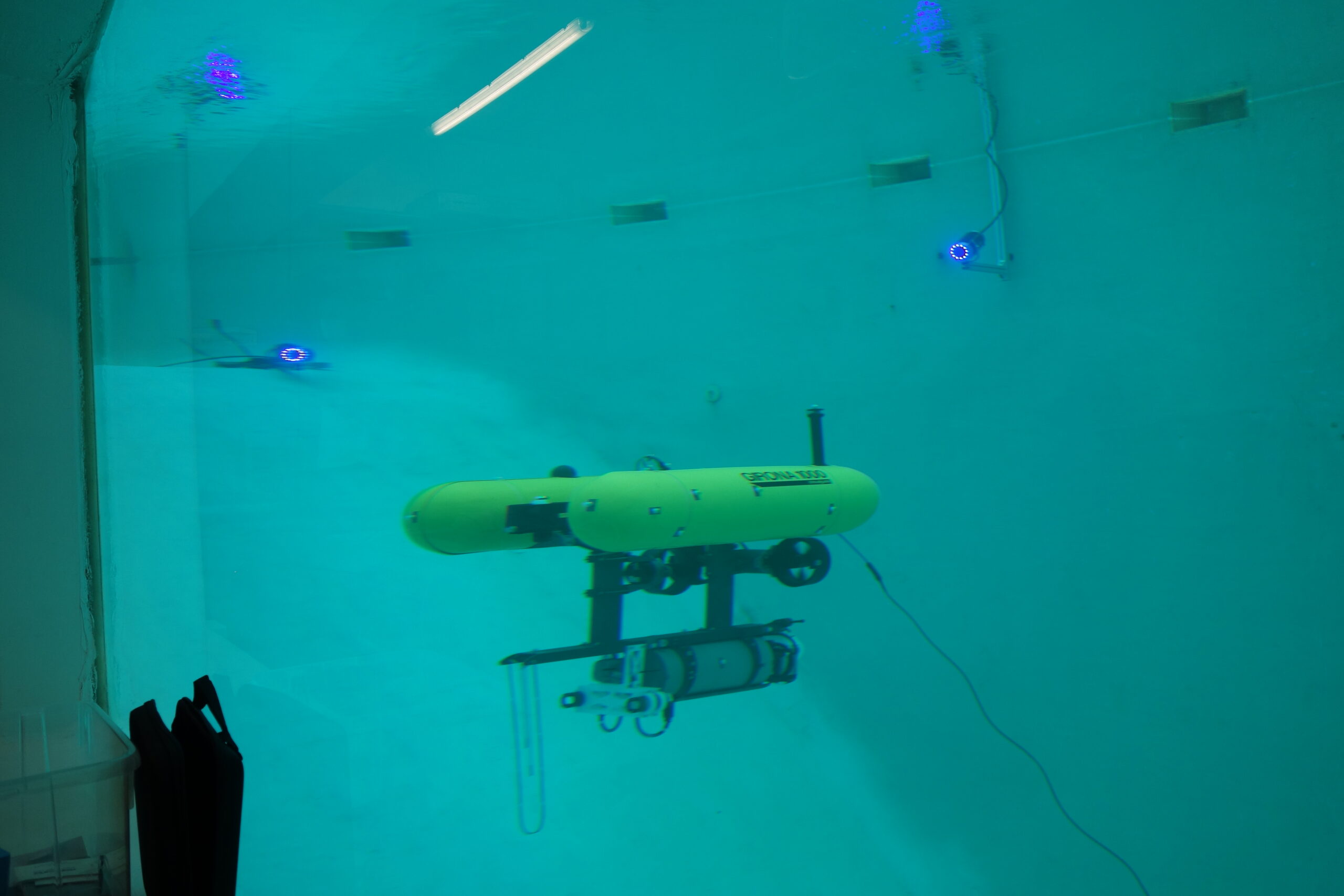
En juin, le laboratoire COSMER était au CIRS de L’université de Girona. L’objectif de cette mission était d’utiliser les robots

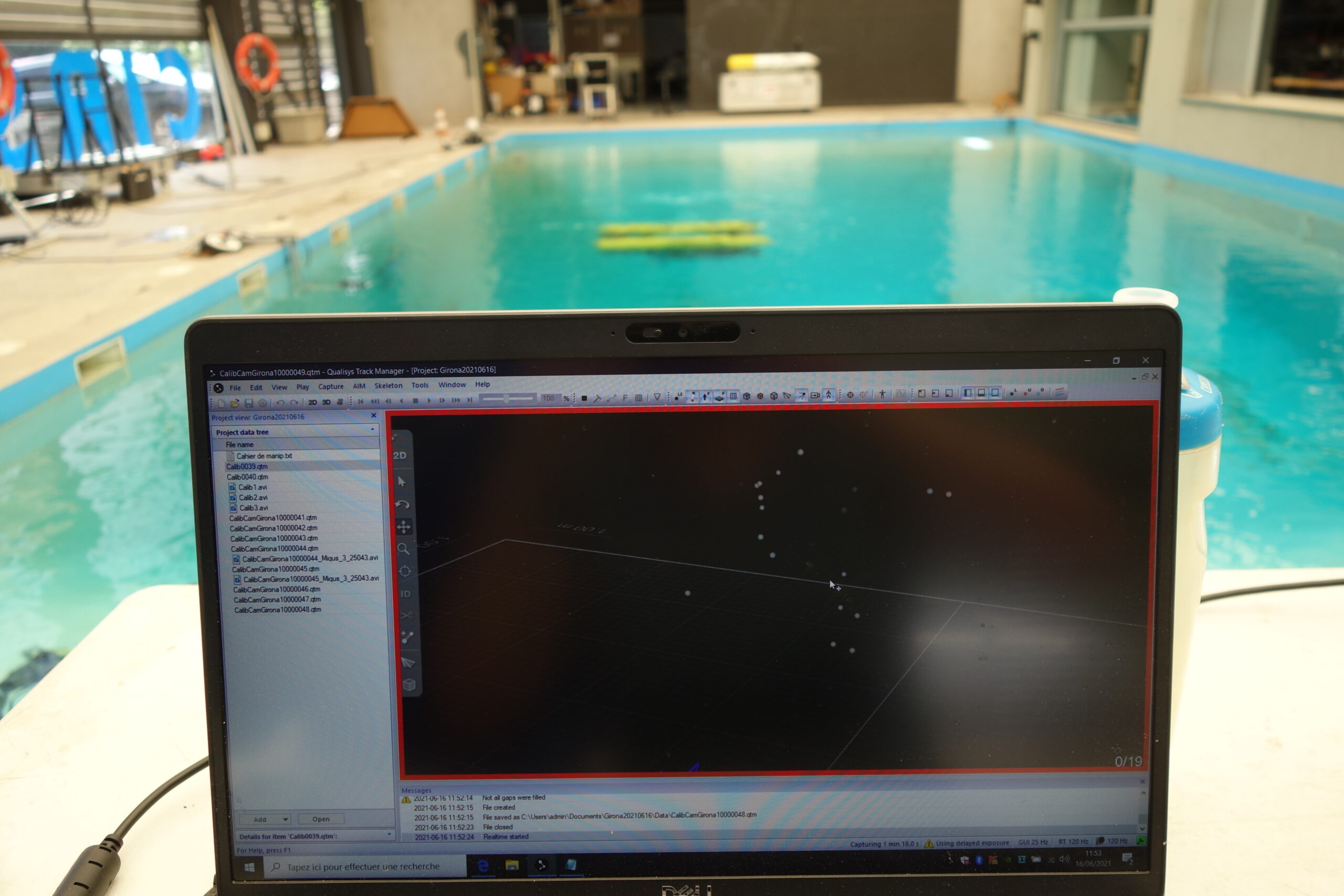
et les inftrastructures du CIRS pour tester les algorithmes développés au COSMER avec un suivi de mouvement dynamique basé sur notre système de motion tracking Qualysis.
Nous avons acquis près de 300 séquences en une semaine et réalisé 6 groupes d’expérimentations différents :
- Estimation des paramètres hydrodynamiques des robots sous marins(Mathieu Richier)
- Développement d’un enrouleur intelligent (Ornella Tortorici et Cédrice Anthierens)
- Estimation visuelle de la forme d’un ombilical pour le contrôle d’une cordée de robots (Juliette Drupt et Claire Dune)
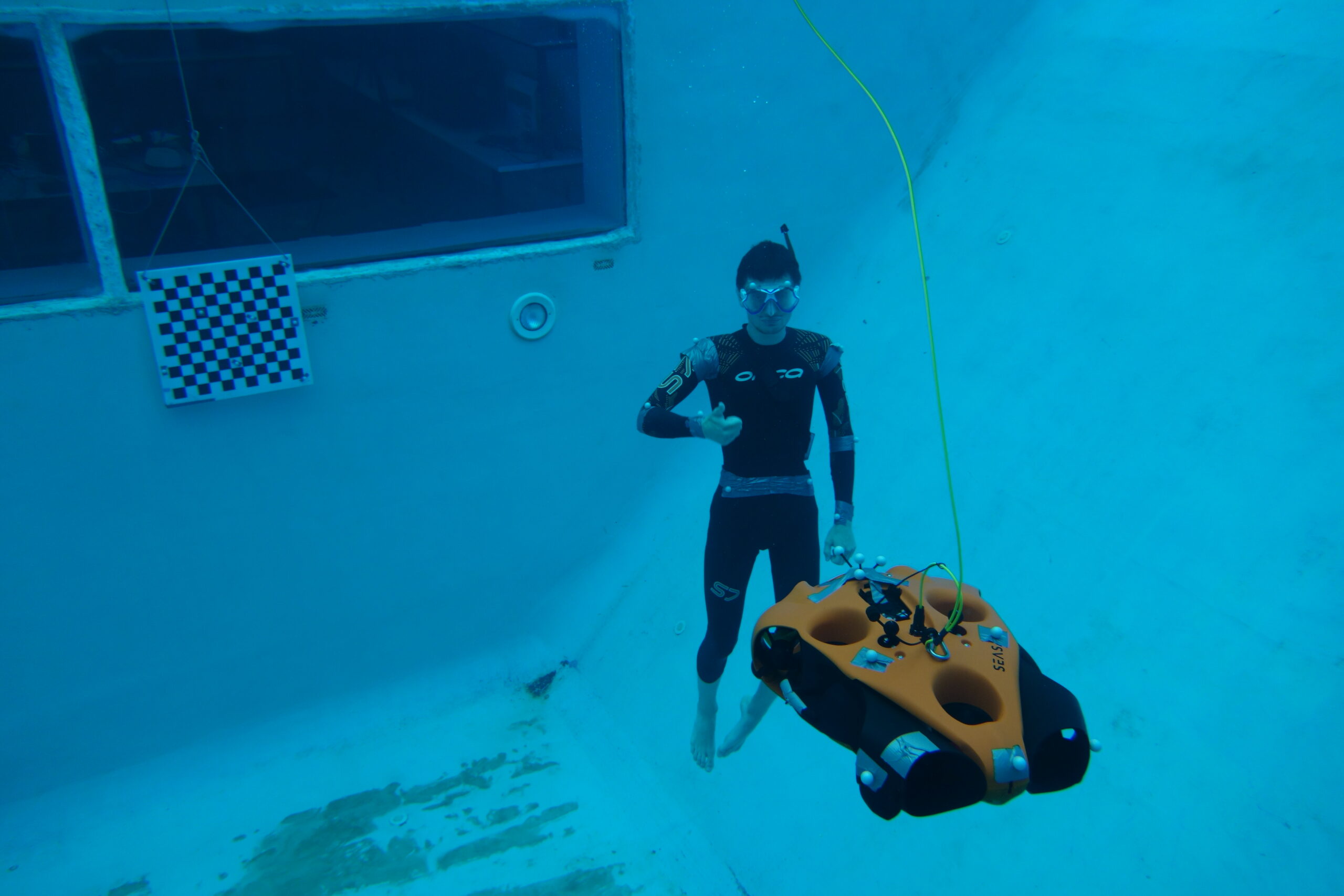
- Estimation accoustique de la position d’un plongeur (Bilal Ghader et Claire Dune)
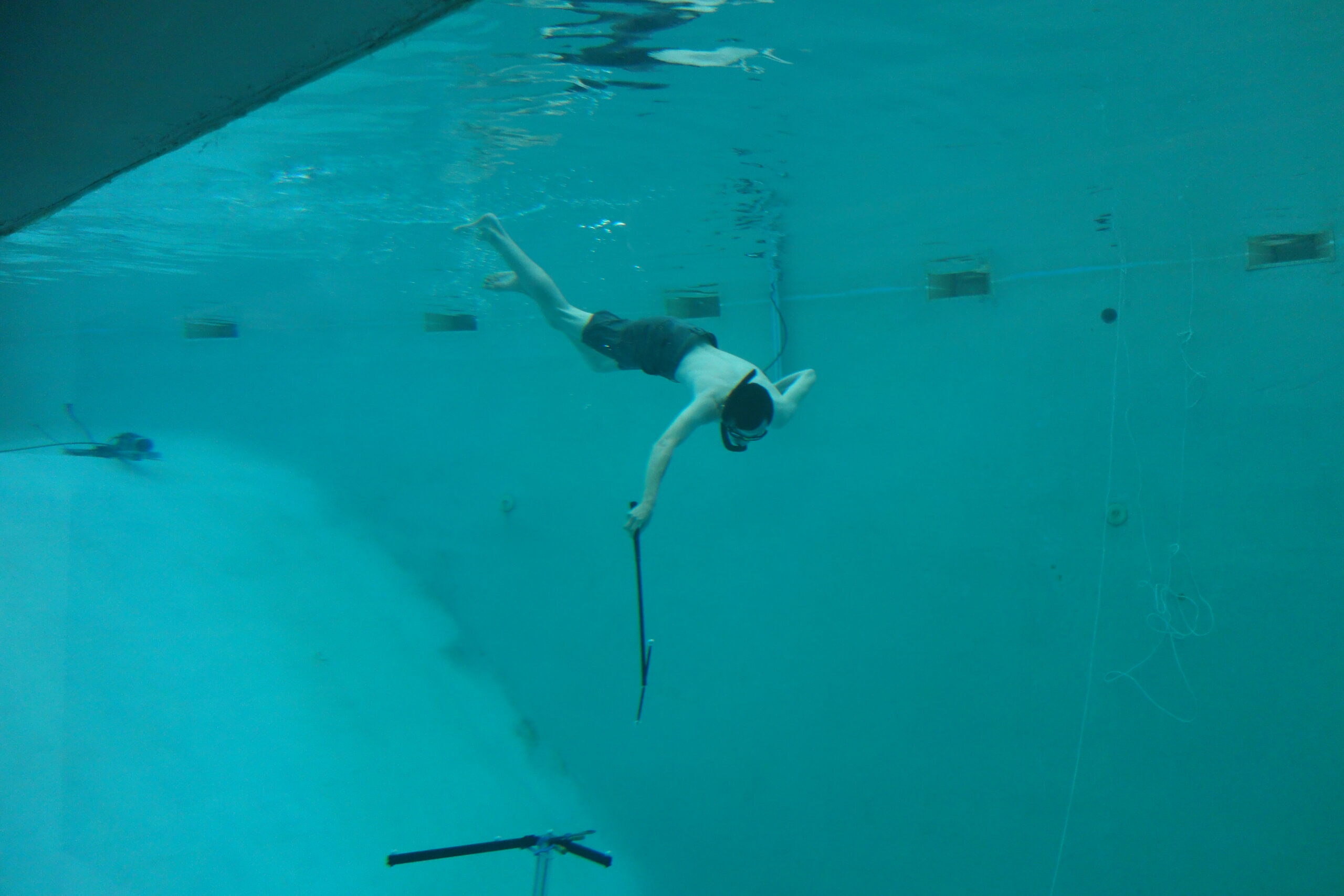
- Reconnaissance des gestes d’un plongeur (Bilal Ghader et Claire Dune)
- Réalisation d’une base de données pour le SLAM sous marin (Clémentin Boittiaux et Claire Dune)
Nous remercions l’équipe du CIRS pour leur accueil et l’aide dans la mise en place des expérimentations !