Cet article permet de comprendre les enjeux de la relocalisation sous-marine à long terme. Les images qu’ils présentent ont été acquises sur 4 visites, espacées sur 6 ans, d’un site géologique profond situé au large des Açores. L’article présente une comparaison de méthodes de relocalisation terrestres connues pour être les plus performantes de l’état de l’art. Les résultats montrent que les images sous-marines représentent un défi pour ces méthodes : changement de caractéristiques du milieu (turbidité), changement géométriques de la scène (effondrement), changements des textures (évolution des peuplements d’animaux fixés), changement de prise de vue (distance du capteur au rocher), changement de capteur, changement d’eclairage,….
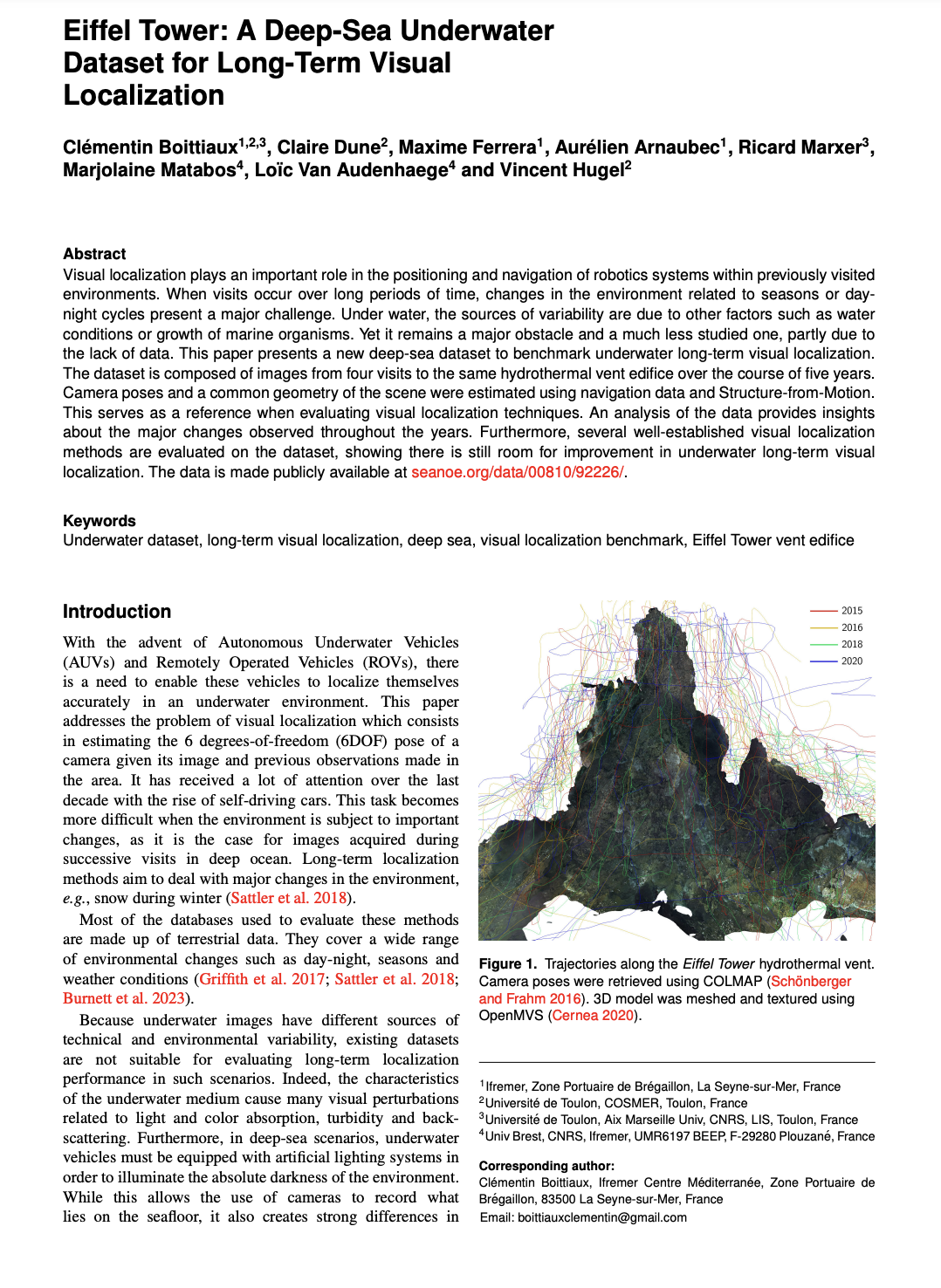
- Clémentin Boittiaux, Claire Dune, Maxime Ferrera, Aurélien Arnaubec, Ricard Marxer, et al.. Eiffel Tower: A Deep-Sea Underwater Dataset for Long-Term Visual Localization. The International Journal of Robotics Research, In press, ⟨10.1177/02783649231177322⟩. ⟨hal-04089339⟩