Juliette Drupt teste les premières estimation des paramètres d’un cable pesant dans les installation du laboratoire IAPS de l’université de Toulon.
Cette première étape dans l’air doit permettre de valider les algorithmes implémentés et comparer les résultats avec un suivi de marqueurs qualysis comme vérité terrain.

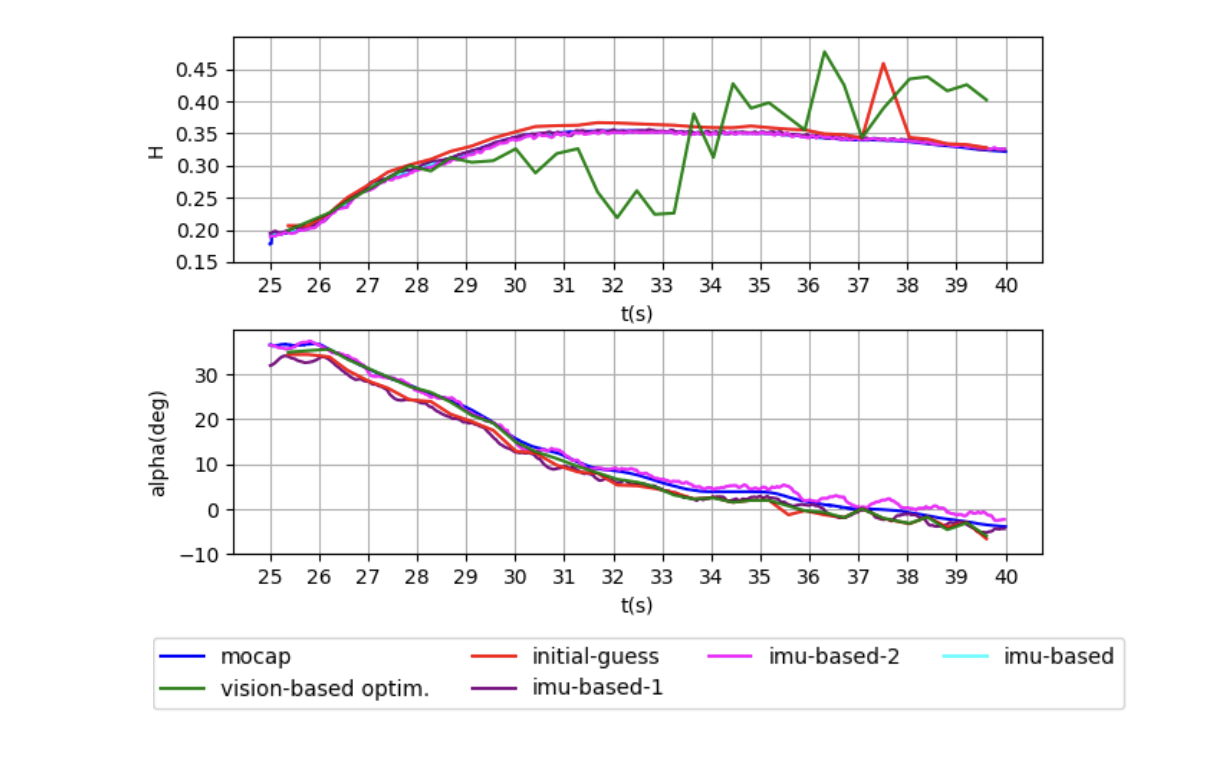
Nous avons comparé les résultat d’estimation de la flèche du cable avec l’angle entre le plan sagittal du robot et le plan du cable obtenus par 5 différents algorithmes :
- estimation par vision à partir de l’hypothèse que le point le plus bas vu dans l’image est le point le plus bas du cable – initial guess en rouge.
- estimation par vision avec descente de gradient – vision-based optim en vert.
- estimation de la forme du cable avec l’imu 1 seule – imu-based-1 en violet
- estimation de la forme du cable avec l’imu 2 seule – imu-based-2 en magenta
- estimation de la forme du cable à partir des deux imus – imu-based en cyan
Les premiers résultats montre une instabilité de la méthode par optimisation numérique du à des minima locaux. Les résultats obtenus avec l’approximation par le point le plus bas est plus stable mais moins précise que les estimations par imu. Les estimation par imu sont supperposé pour ce qui est de l’estimation de la flèche et comparables pour ce qui est de l’estimation de alpha. Il semble donc qu’une estimation avec une seule IMU soit suffisante pour obtenir une bonne estimation de la forme du cable dans une situation quasi-statique. Ces premiers résultats prometteurs dans l’air ont maintenant a être confirmés dans l’eau.