Nous avons privilégié l’achat de mini robots sous-marins légers. Même si leur charge utile et leurs capacités sont limitées, ils présentent de nombreux avantages : ils sont peu coûteux, légers et donc faciles à déployer, Il sont également faciles à programmer (programmation web et ROS/python/C++) et peuvent servir aux étudiants en projet et à la mise en place de nouveaux travaux pratiques au sein des formations de l’Université.
OPEN ROV

Le premier ROV du laboratoire COSMER était un Open ROV. C’est un robot sous-marin « open source » livré en kit. Ce premier ROV a permis de réaliser des premiers tests en bassin et d’obtenir des premiers retours capteurs lors de missions sous-marines. Il est contrôlé via une interface web et les contrôleurs sont codés en Node.js
A partir des premières études sur ce ROV, nous avons défini des projets d’étudiants de l’école SEATECH dédiés au développement d’un nouveau prototype, avec rétro-conception du compartiment principal et du compartiment batteries.

BLUE ROV
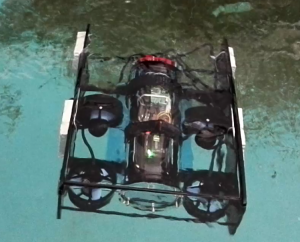
Nous avons ensuite implanté une architecture électronique/informatique sur un deuxième type de ROV open source : le Blue ROV. Le laboratoire possède deux modèles de ce ROV : le Blue ROV I et le Blue ROV II. Ces deux robots servent de support aux expérimentations de thèse dans le domaine de la robotique sous-marine.