Le samedi 4 février 2023, la 7ème édition des Entretiens de l’Excellence s’est déroulée à l’EDHEC Business School sur le campus de Nice, avec pour ambition de mobiliser un nombre important d’élèves et d’établissements scolaires de l’académie de Nice.
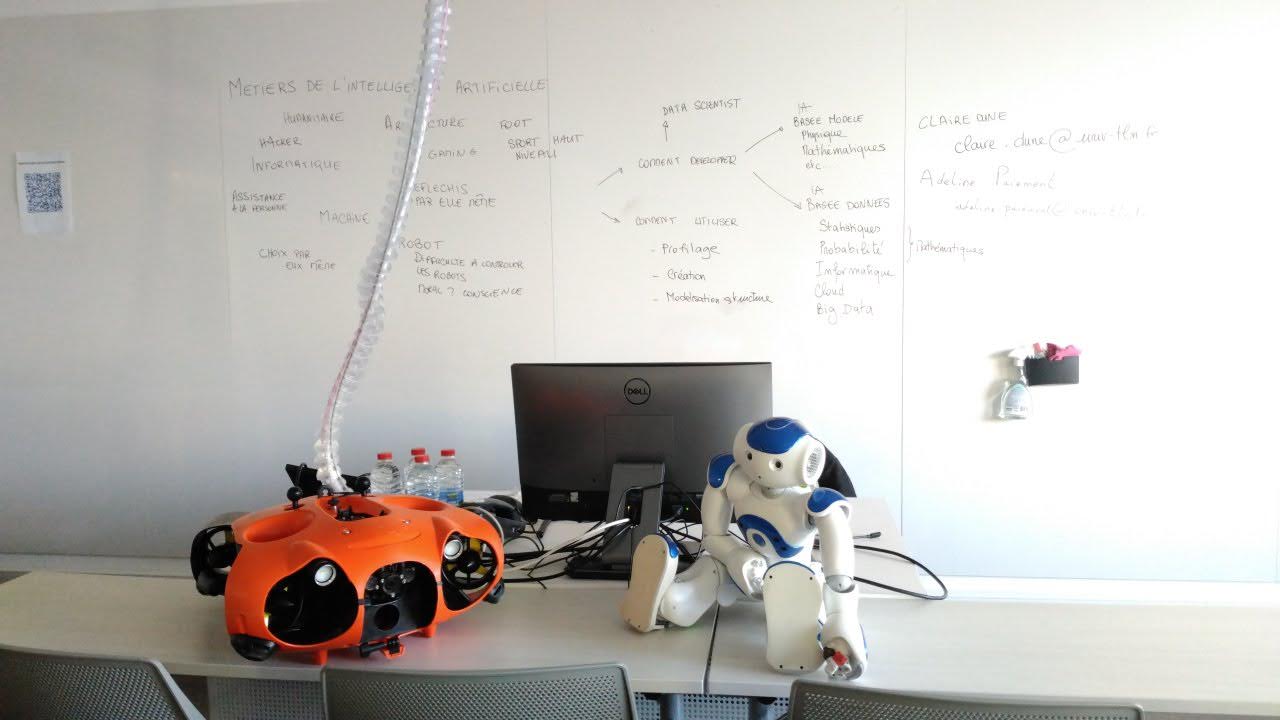
Claire DUNE du COSMER et Adeline PAIEMENT du CNRS LIS de Toulon ont animé l’atelier interctif « Intelligence Artificielle et Robotique ». L’objectif était de présenter aux élèves de collèges et de lycées de la région les parcours universitaires et les métiers naissants dans ces domaines.