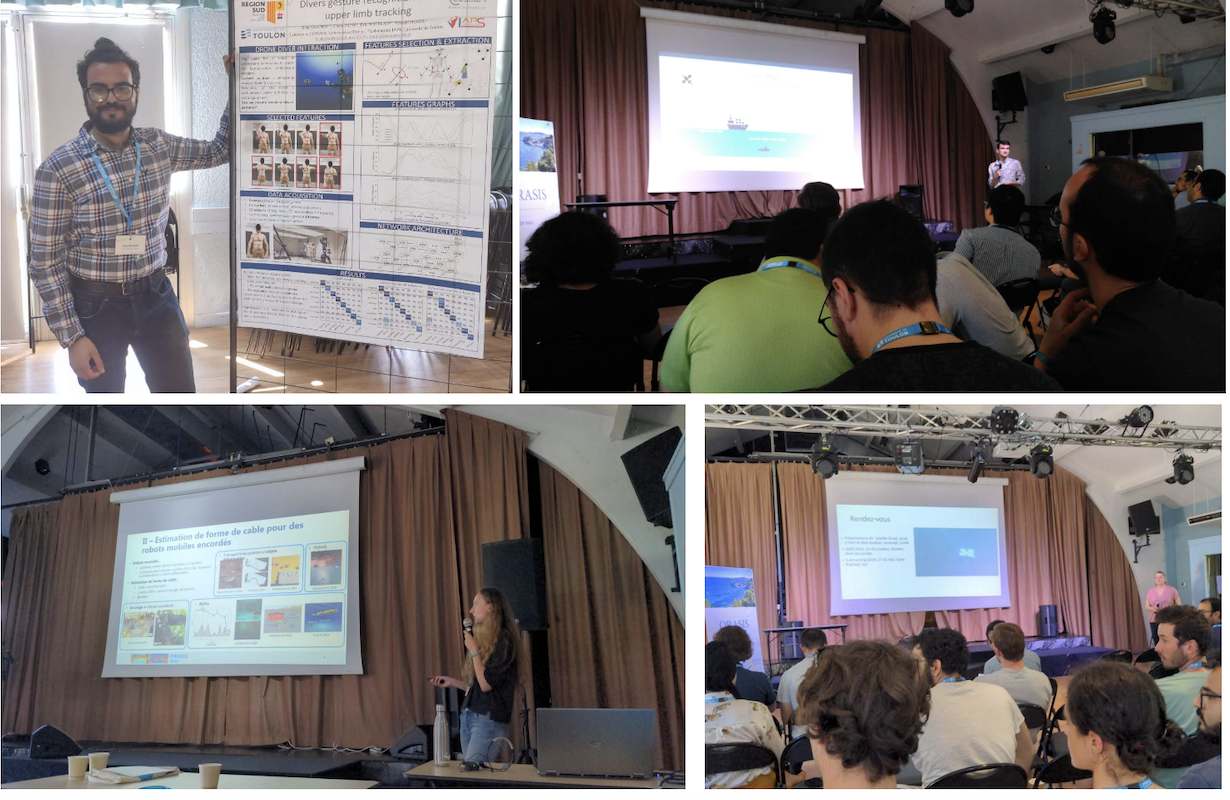
Bilal Ghader et Juliette Drupt présentent leurs travaux à la conférence Oceans 2023 sur la reconnaissance des gestes des plongeurs et la comparaison des algorithmes de SLAM en milieu sous-marin.

La cérémonie d’ouverture a été centrée sur l’avenir des océans face aux changements climatiques et l’objectif de décarboner les transports maritimes d’ici 2050. Elle a été suivie par un keynote sur l’énergie par éolienne maritime.

Edin Omerdic, l’organisateur de la conférence, nous a fait visiter son laboratoire et leur plateforme de commande haut niveau des ROV avec casque de réalité virtuelle et reconnaissance vocale. Le plannificateur de mission permet de determiner une trajectoire avec des points de passage et de monitorer l’état du robot. Un de leurs axes de recherche porte sur la reconfiguration en ligne du modèle du ROV en cas de perte ou de dégradation des capacités d’un propulseur.

- Bilal Ghader, Claire Dune, Eric Watelain, Vincent Hugel. Skeleton-based Visual Recognition of Diver’s Gesture. OCEANS 2023, University of Limerick, Jun 2023, Limerick, France. ⟨hal-04116540⟩
- Juliette Drupt, Claire Dune, Andrew I. Comport, Vincent Hugel. Qualitative evaluation of state-of-the-art DSO and ORB-SLAM-based monocular visual SLAM algorithms for underwater applications. OCEANS 2023, University of Limerick, Jun 2023, Limerick, France. ⟨hal-04116537⟩