“This thesis addresses the problem of tether shape control for small remotely operated underwater vehicles (mini-ROVs), which are suitable, thanks to their small size and high maneuverability, for the exploration of shallow waters and cluttered spaces. The management of the tether is, however, a hard task, since these robots do not have enough propulsion power to counterbalance the drag forces acting on the tether cable. In order to cope with this problem, we introduced the concept of a Chain of mini-ROVs, where several robots are linked to the tether cable and can, together, manage the external perturbations and control the shape of the cable.
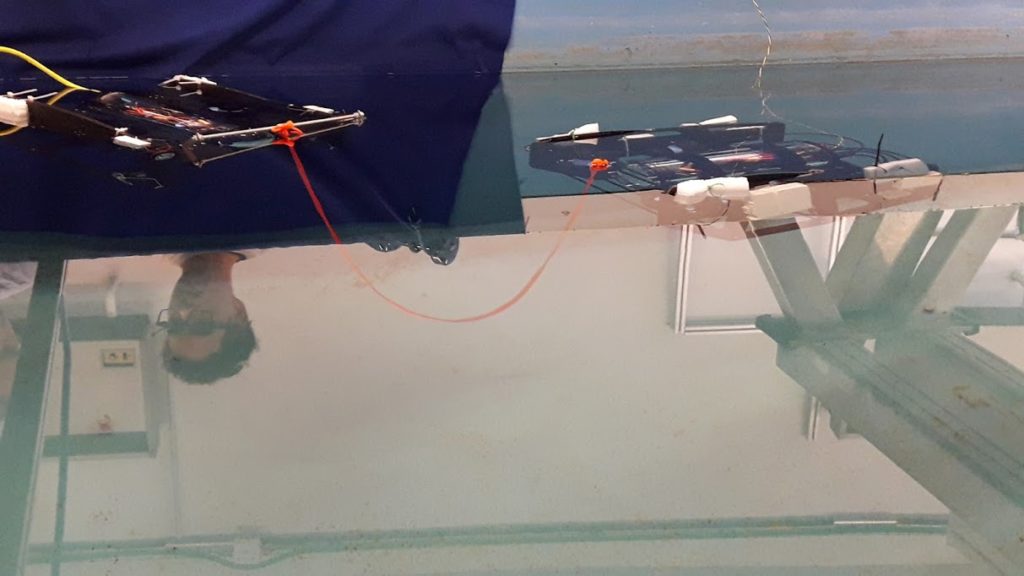
We investigated the use of the embedded cameras to regulate the shape of a portion of tether linking two successive robots, a leader and a follower. Only the follower robot deals with the tether shape regulation task. The leader is released to explore its surroundings. The tether linking both robots is assumed to be negatively buoyant and is modeled by a catenary. The tether shape parameters are estimated in real-time by a nonlinear optimization procedure that fits the catenary model to the tether detected points in the image. The shape parameter regulation is thus achieved through a catenary-based control scheme relating the robot motion with the tether shape variation. The proposed visual servoing control scheme has proved to properly manage the tether shape in simulations and real experiments in pool.”