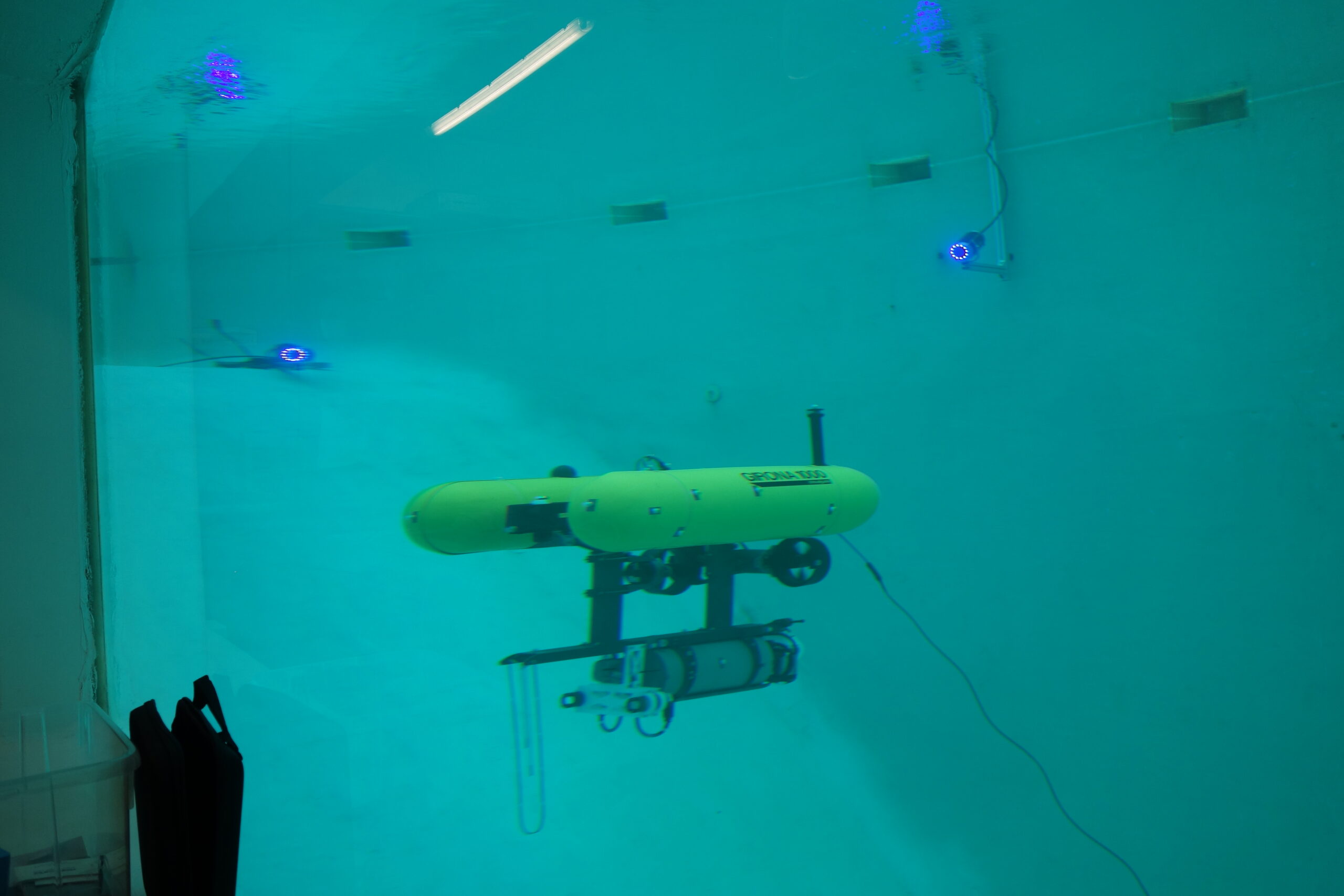
In June, the COSMER laboratory was at CIRS of the University of Girona. The objective of this mission was to use the robot

s and inftrastructures of CIRS to test the algorithms developed at COSMER with a dynamic motion tracking based on our Qualysis motion tracking system.
We acquired nearly 300 sequences in one week and carried out 6 different groups of experiments:
- Estimation of the hydrodynamic parameters of underwater robots (Mathieu Richier)
- Development of an intelligent reel (Ornella Tortorici and Cédrice Anthierens)
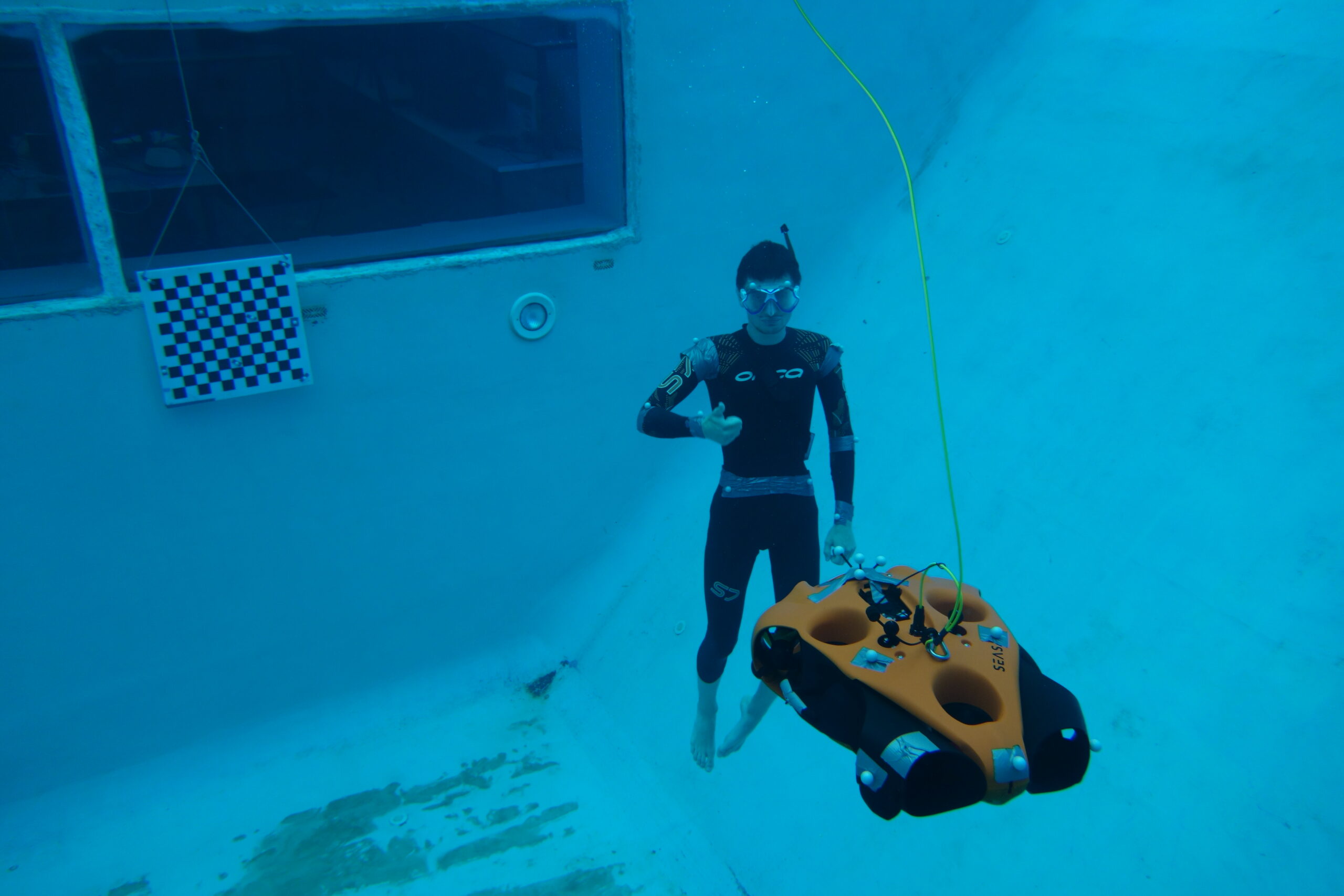
- Visual estimation of the shape of an umbilical for the control of a robot rope (Juliette Drupt and Claire Dune)
- Acoustic estimation of a diver’s position (Bilal Ghader and Claire Dune)
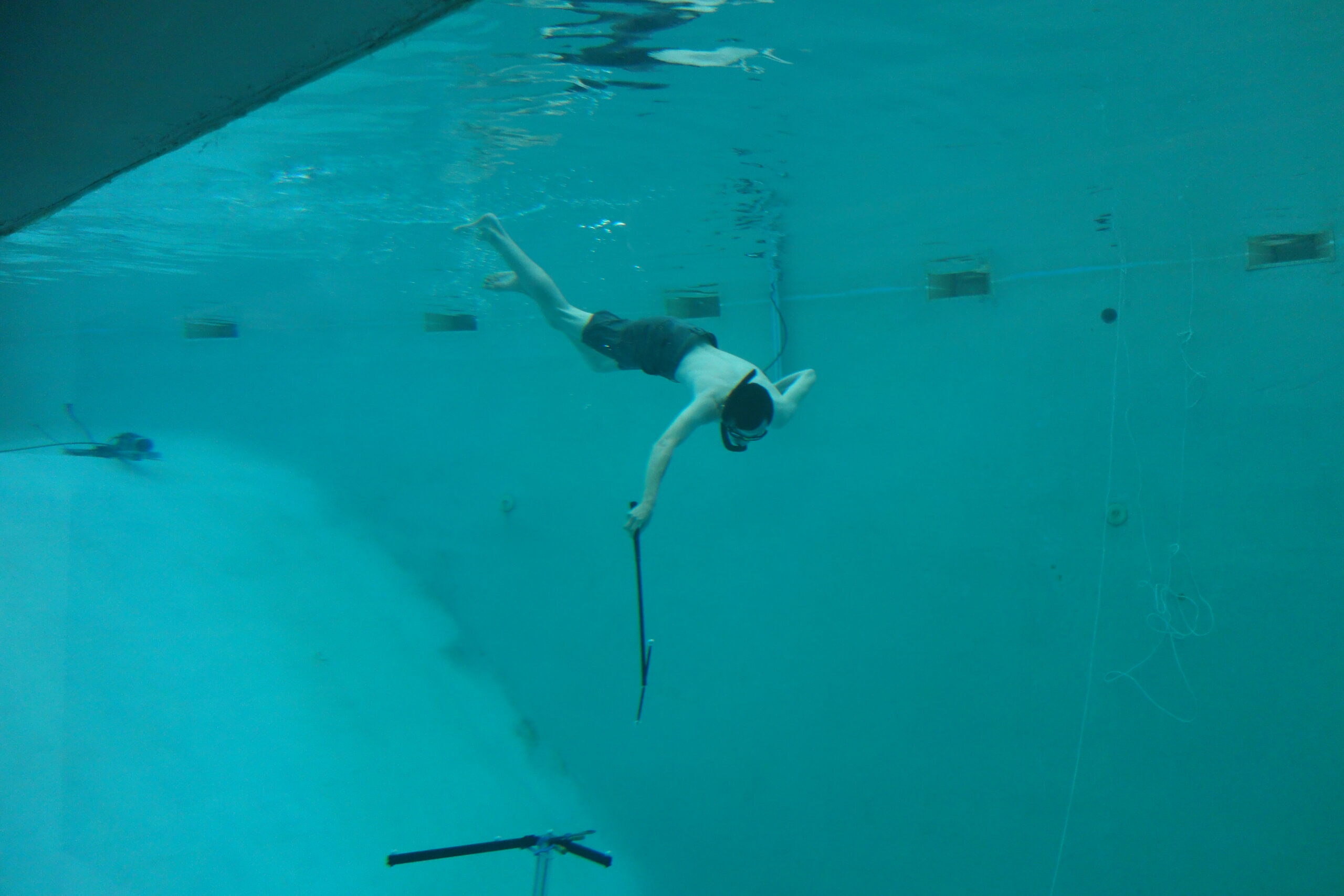
- Recognition of a diver’s gestures (Bilal Ghader and Claire Dune)
- Creation of a database for underwater SLAM (Clémentin Boittiaux and Claire Dune)
We thank the CIRS team for their welcome and help in setting up the experiments!