Installations expérimentales :
Des expériences avec des robots sous-marins peuvent être effectuées à trois endroits différents :
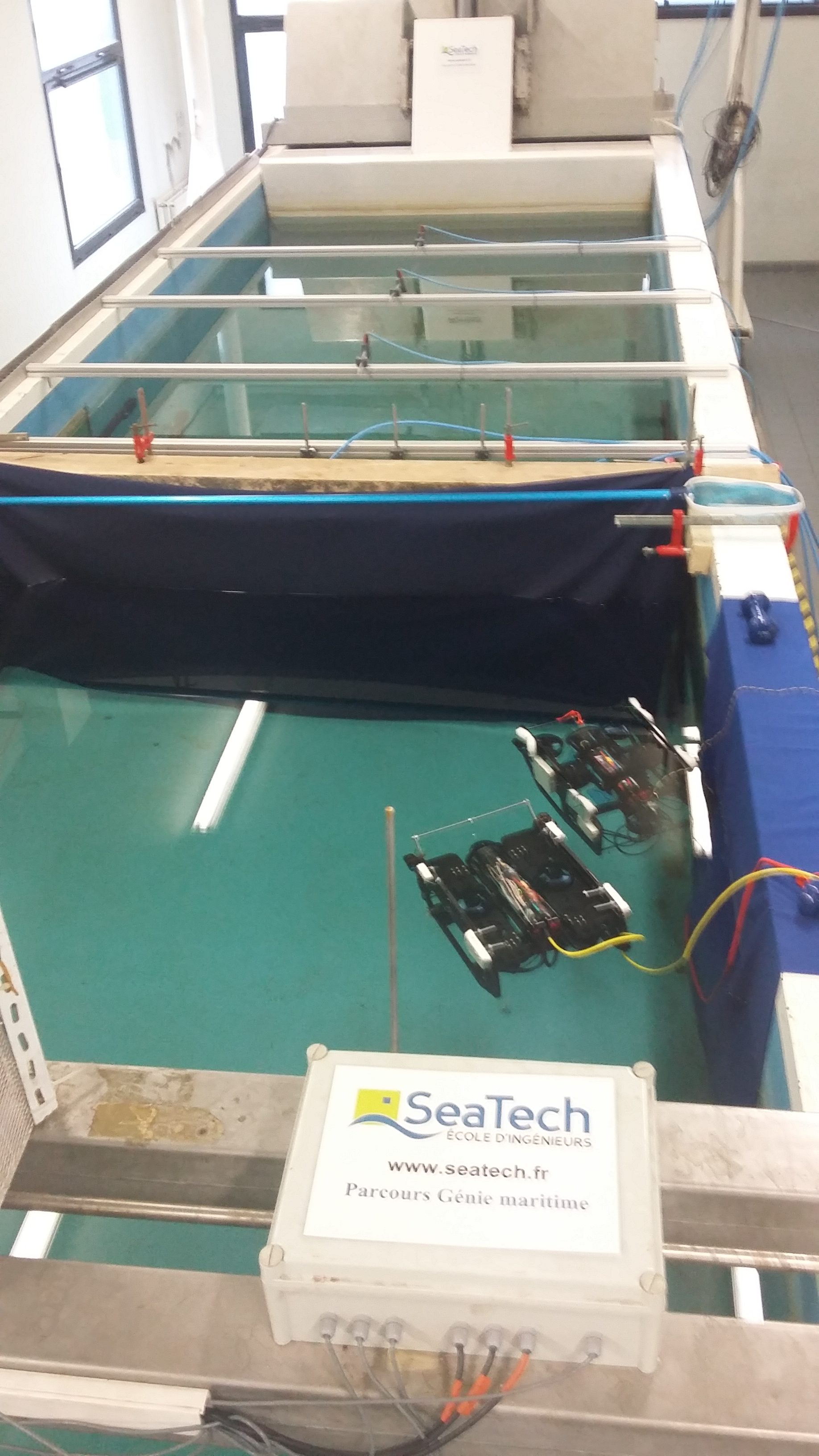
– bassin à houle, 3m x 10m, profondeur 1.5 m avec une pente à l’une des extrémités, situé à Seatech, Université de Toulon. Le bassin est équipé d’une générateur de vagues qui permet de produire une houle de 10 cm crête à crête à differentes fréquences.
– bassin de test interne, 3m x 3m, profondeur 6m, situé à Ifremer, La Seyne sur Mer.
 |
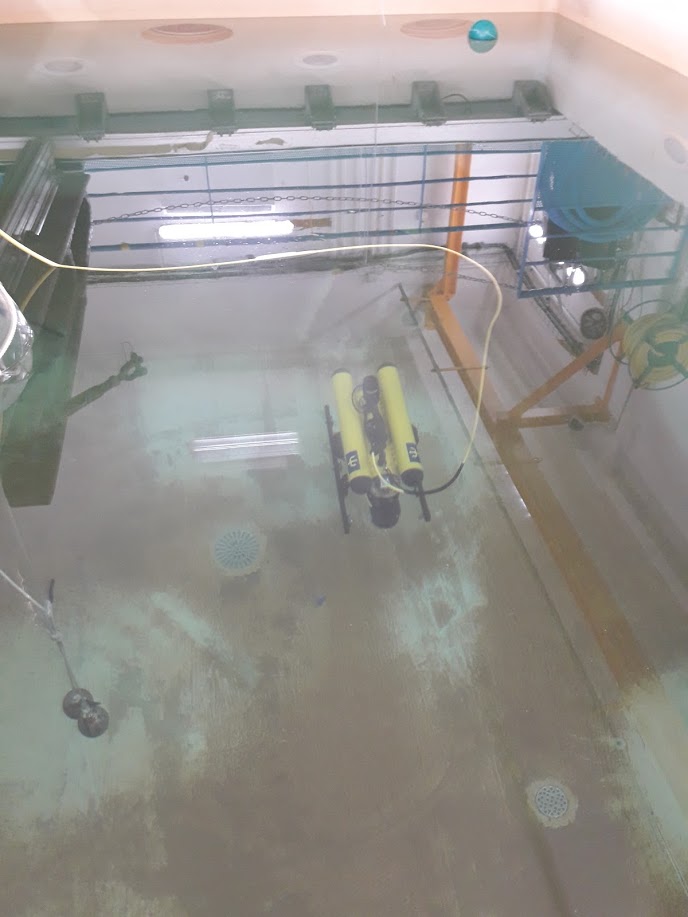 |
– bassin de test externe situé à Ifremer, La Seyne sur Mer, d’une superficie de 160 m2 et une profondeur de 6 m.
Les chercheurs du laboratoire Cosmer ont accès aux bancs d’essais du centre méditerranéen de l’Ifremer.
Le centre de l’Ifremer est situé à 20 minutes en voiture du campus de la Garde de l’Université de Toulon.
Robots disponibles :
– ROV CORAL– Ifremer/COSMER

Fabriqué par la société SUBSEA TECH , le ROV CORAL est équipé de trois propulseurs, comprend 2 caméras, un sonar à balayage, un loch Doppler, un système de positionnement USBL, un capteur de profondeur et une unité de mesure inertielle. Il est compatible ROS. Ce robot est destiné à l’enseignement et à la recherche.
– VORTEX – Ifremer (source and copyright : Ifremer)
VORTEX est un véhicule ouvert et reconfigurable pour les techniques expérimentales de l’Ifremer. C’est un ROV expérimental (véhicule téléopéré) qui sert de moyen d’expérimentation et de démonstration en robotique d’intervention sous-marine. Il est dédié à la recherche fondamentale et au développement technologique dans le domaine de la robotique sous-marine d’intervention. Il peut être commandé à distance à l’aide d’un joystick ou être programmé pour exécuter des modes de contrôle automatique à partir des données acquises par ses capteurs embarqués.
{kind=link}

Les capteurs embarqués comprennent une caméra vidéo, un sonar à balayage, un sondeur acoustique, un enregistreur de vitesse Doppler, une boussole et des gyromètres. Ses caractéristiques sont :
- poids: 220 kg,
- Dimensions: 1.30m x 1.10m x 1.0 m,
- Immersion maximale: 50 m,
- connexion fond/surface par fibre optique: alimentation, donnée et canaux 2 video,
- contrôleur de surface PIRRAT sous Linux OS avec accès Ethernet pour l’interface de traitement de données externe,
- Commande en mode automatique ou manuel (IHM ou joystick sans fil).
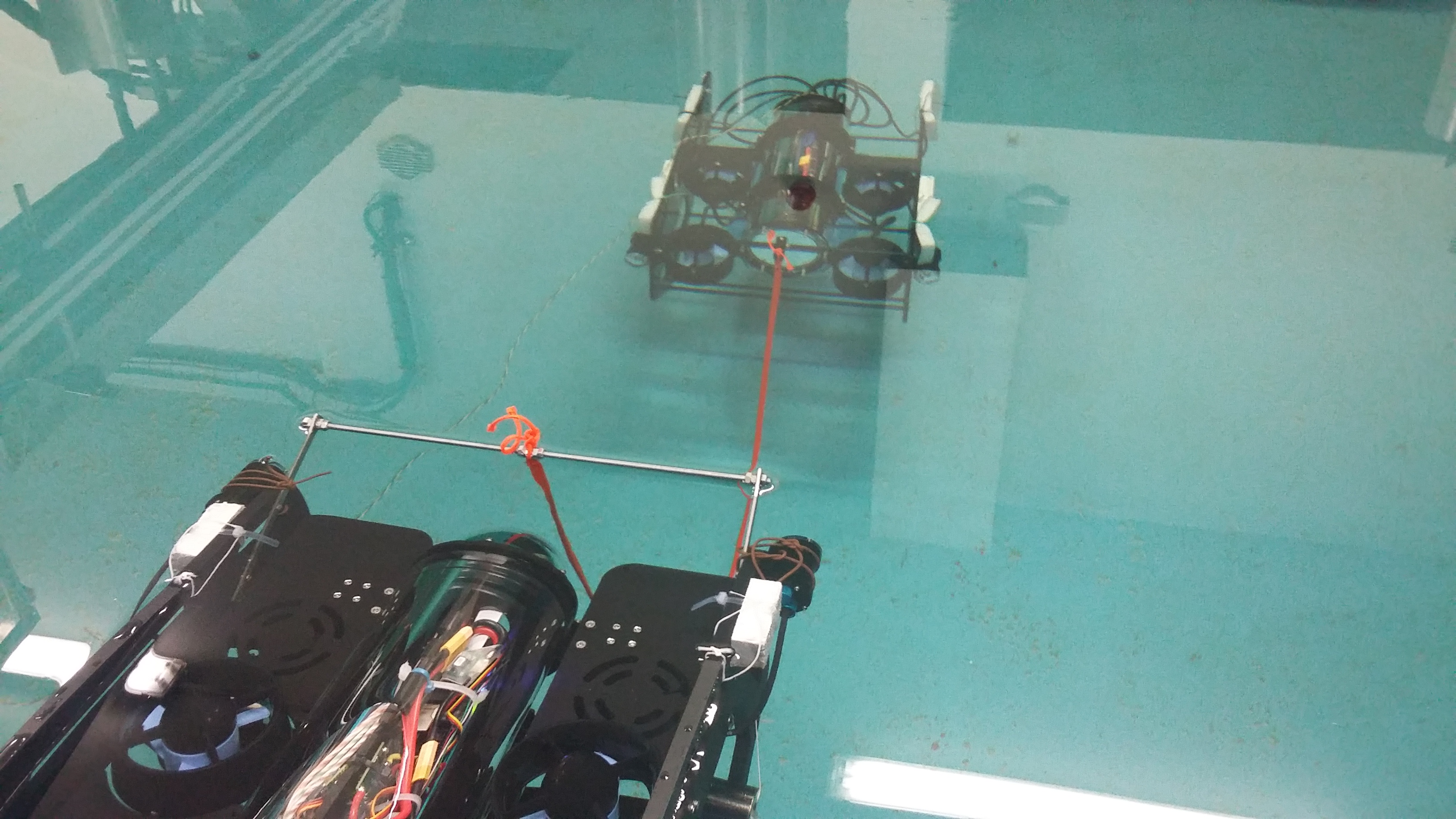
– Robots BlueRov™, 1ère et 2nde générations.
Ces robots sont des robots à bas coût, open source, légers et compacts, faciles à déployer. Ils sont également faciles à programmer (ROS/python/C+++) et peuvent être utilisés dans la formation pédagogique des étudiants pour leurs projets, et pour mettre en place de nouveaux travaux pratiques pour des activités d’enseignement à l’université.
 |
 |
– Robots OpenRov™,
Ces robots ont été les premiers kits utilisés en 2016 à des fins éducatives. Les principaux projets qui ont été développés comprenaient la rétroingénierie par fabrication additive de compartiments électroniques et de batteries, et la programmation intégrée de fonctionnalités de détection d’objets visuels en javascript en utilisant Node.js.