Ce travail s’inscrit dans l’axe de recherche « gestion des ombilicaux des ROVs » du laboratoire et fait suite au travail sur la modélisation des câbles immergés initié par Juliette Drupt pendant sa thèse de doctorat. C’est le résultat d’un travail collectif des doctorants du Cosmer, Martin Filliung, Juliette Drupt et Charly Peraud, et de leurs encadrants.
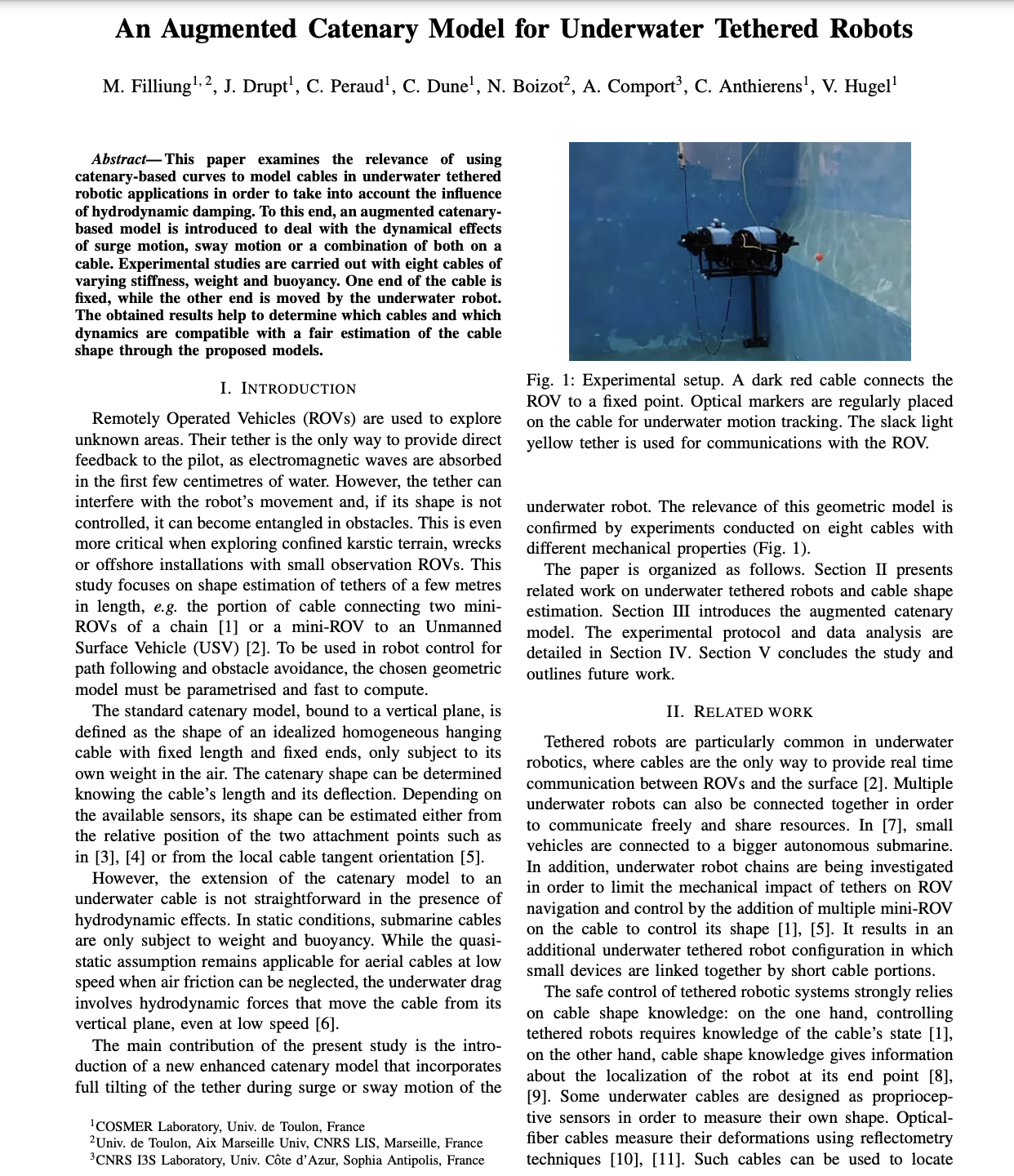
L’article présente l’analyse du comportement de 8 câbles de caractéristiques mécaniques différentes (raideur, elasticité, poids, flottabilité) relié à un ROV. Ils simulent le comportement d’ombilicaux porteurs de courant ou porteurs d’information. En supposant que le cable est flottant ou coulant, son modèle quasi-statique est une chaînette. Dans cette étude, nous avons évalué la persistence de ce modèle de chainette lors d’un déplacement d’une des extrémités du câble dans son plan ou hors de son plan. Cela nous a conduit à proposer l’ajout de deux degrès de liberté supplémentaires aux modèle de chaînette pour modéliser les effets des forces hydrodynamiques, en particulier les forces de trainée.
Ces travaux seront présentés au printemps, à la conférence internationale IEEE ICRA qui aura lieu à Yokohama, Japon.
- Martin Filliung, Juliette Drupt, Charly Peraud, Claire Dune, Nicolas Boizot, et al.. An Augmented Catenary Model for Underwater Tethered Robots. IEEE International Conference on Robotics and Automation (ICRA 2024), May 2024, Yokohama, Japan. ⟨hal-04459364⟩