ORASIS 2023, les journées francophones des jeunes chercheurs en vision par ordinateur, se sont tenues à Carqueiranne du 22 au 26 mai.
Bilal Ghader, Clémentin Boittiaux et Juliette Drupt y ont présenté leur travaux de thèse. Claire Dune une présentation keynote sur ses travaux envision pour la robotique sous marine.
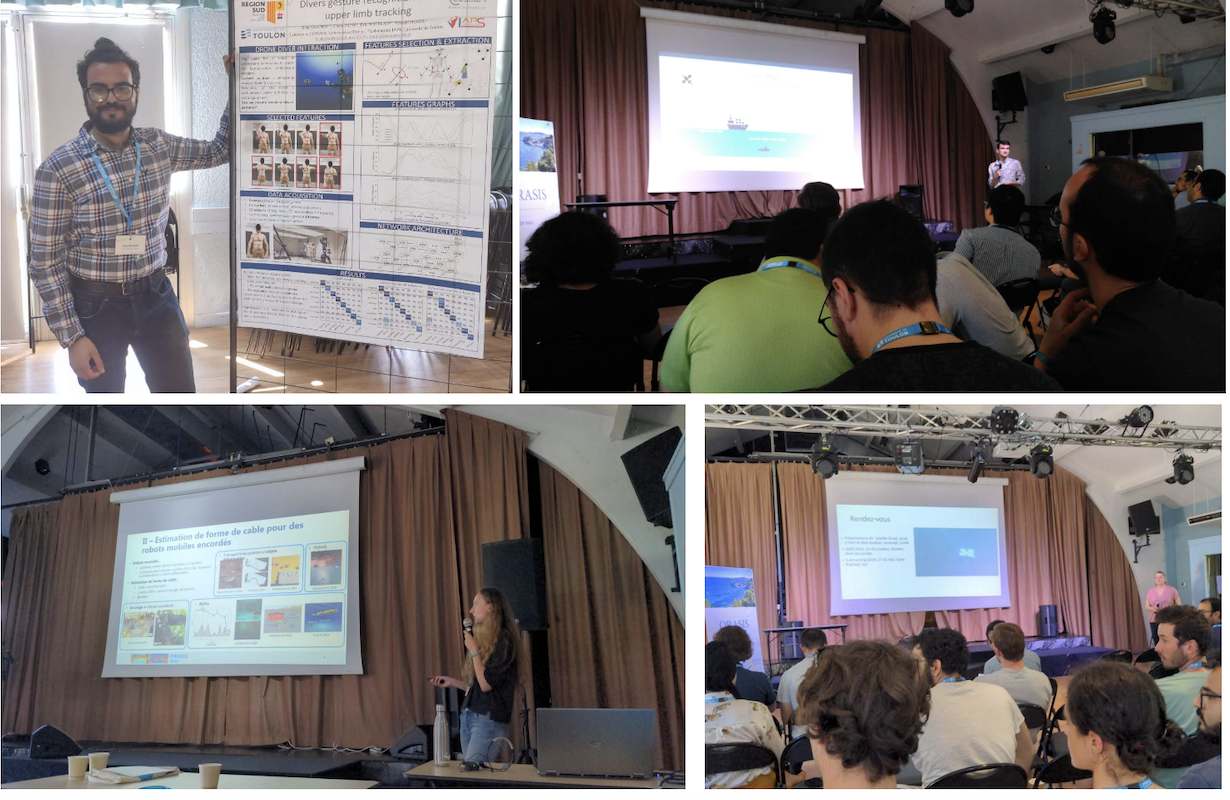
- Bilal Ghader, Claire Dune, Eric Watelain, Vincent Hugel. Divers gesture recognition from upper limb tracking. 19éme colloque ORASIS (journées francophones des jeunes chercheurs en vision par ordinateur ), Thanh Phuong Nguyen; Yassine Zniyed; Nadège Thirion-Moreau; Sandra Senisar; Eric Moreau; Thanh Tuan Nguyen, May 2023, Carqueiranne, France. ⟨hal-04108621⟩
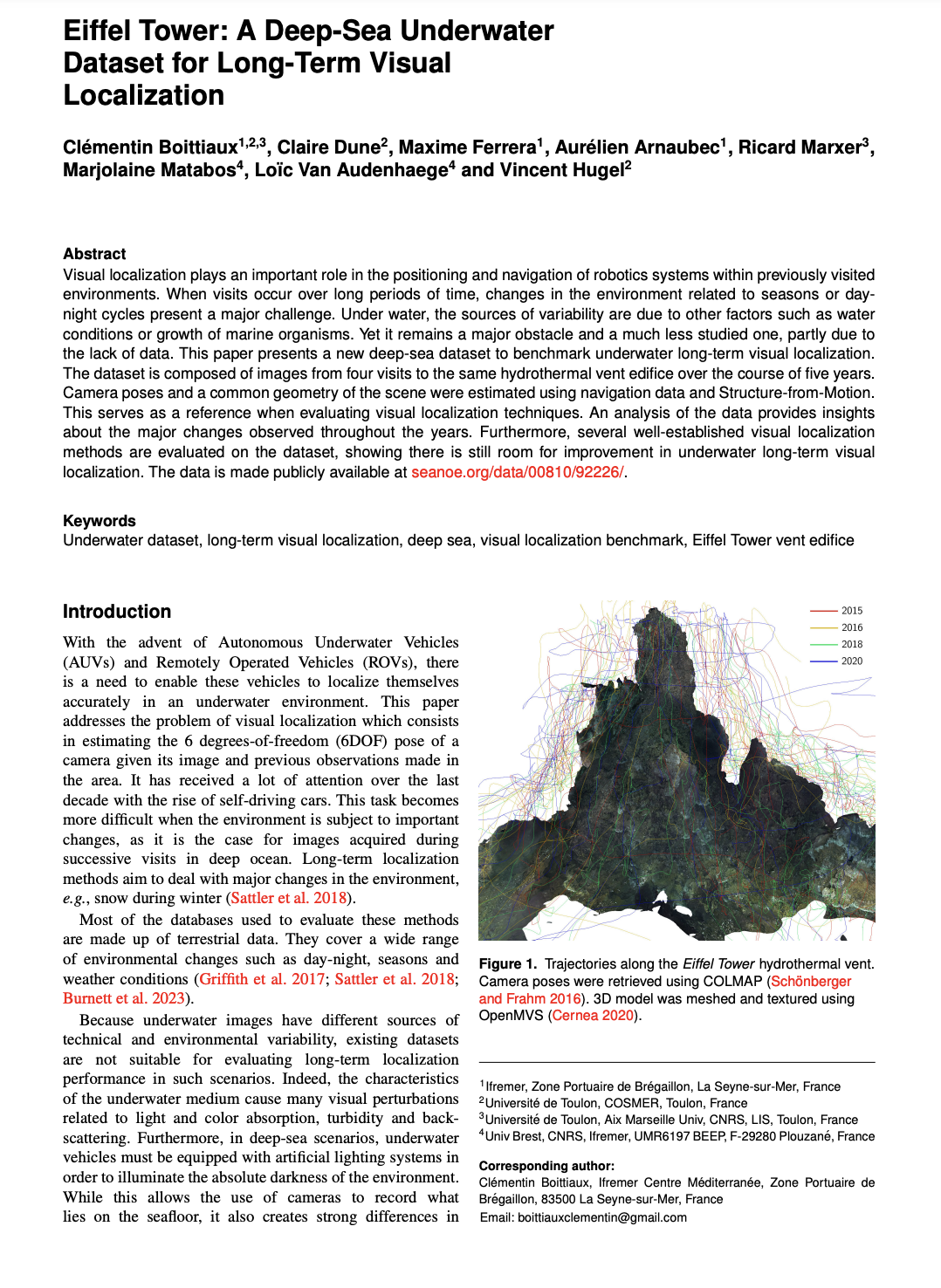
- Clémentin Boittiaux, Claire Dune, Aurélien Arnaubec, Ricard Marxer, Maxime Ferrera, et al.. Long-term visual localization in deep-sea underwater environment. ORASIS, Thanh Phuong Nguyen, May 2023, Carqueiranne, France. ⟨hal-04108737⟩
- Juliette Drupt, Claire Dune, Andrew I Comport, Vincent Hugel. Estimation de forme de câble pesant pour la localisation de robots sous-marins encordés : comparaison d’une approche visuelle à une nouvelle approche inertielle. ORASIS, Thanh Phuong Nguyen, May 2023, Carqueiranne, France. ⟨hal-04108624⟩