Catégorie : Rayonnement
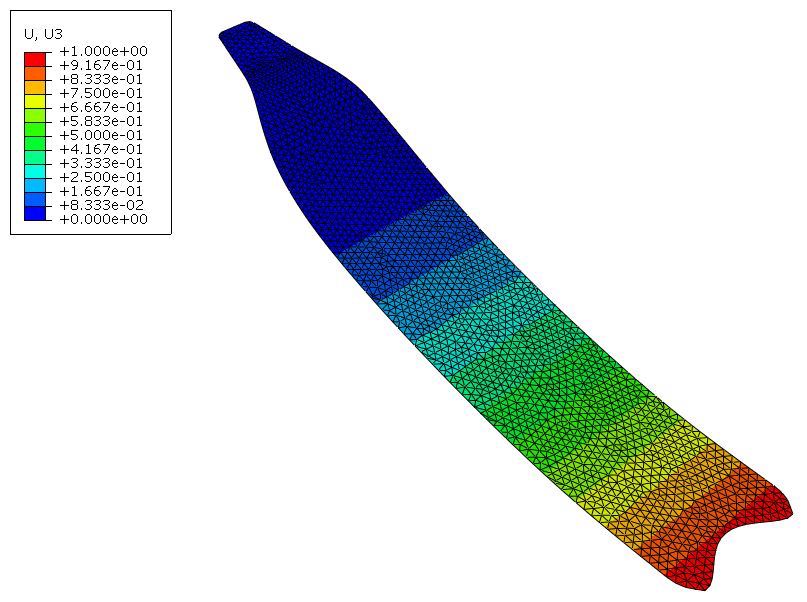
Benjamin Ostré : Etude biomécanique des palmes d’apnée
Dans le cadre de sa recherche en conception Mécanique et de ses enseignements a SeaTech, Benjamin Ostré a étudié avec un groupe d’étudiant ingénieur les palmes des apnéistes.
La thématique multi-disciplinaire des palmes à la particularité d’avoir été menée sur les trois ans de la formation initiale à SeaTech. Chaque année, pendant une trentaine d’heures, un groupe de 6 étudiants passionnés a fait progressé la problématique des palmes d’apnée, encadré par Benjamin Ostre, Maître de Conférence à SeaTech, chercheur au laboratoire COSMER, et soutenu par de très nombreux partenaires régionaux.
Pour en savoir plus :
- https://seatech.univ-tln.fr/On-retient-son-souffle-a-SeaTech.html
- Article Subaqua


IEEE IROS 2020 : Workshop on Managing deformation: A step towards higher robot autonomy
Notre proposition de workshop pour la conférence IROS 2020 sur le controle des objets déformables a été accepté.
Il aura lieu le 25 octobre 2020, à Las Vegas.
La capacité d’interagir avec des objets déformables de toute taille est une condition préalable à l’autonomie avancée des robots. Selon la taille de l’objet, le développement de ces compétences peut impliquer tous les degrés de liberté d’un ou plusieurs systèmes robotiques, et même la mobilité d’une plate-forme active. Ces compétences sont nécessaires dans de multiples domaines, allant de la préhension et de la manipulation d’objets quotidiens (nourriture, vêtements, etc.) en robotique de consommation, aux procédures robotisées chirurgicales (manipulation de tissus, guidage d’aiguilles flexibles, etc.), à la collecte de produits agricoles ou au déplacement de grands objets flexibles (tels que des câbles, des cordes et des tentes).
Cependant, la prise en compte de la déformation introduit notamment de nouveaux défis :
- La complication de la détection de la déformation
- La malédiction de la dimensionnalité infinie de la configuration de déformation
- La complexité de la forte non-linéarité dans la modélisation de la déformation
De nouveaux paradigmes sont nécessaires pour relever ces défis. L’objectif de ce workshop est donc de discuter des nouvelles perspectives de recherche en tenant compte de la déformation de l’objet dans diverses applications robotiques.
L’appel a participation va être lancé très prochainement, vous pouvez retrouver toutes les informations sur le site du workshop :
https://sites.google.com/view/madef-iros2020/home
Interview de Nicolas et Mathieu lors de leur mission à Girona
Video
Nicolas et Mathieu étaient à Girona en mars pour faire des expérimentation dans les bassins du CIRS (Centre d’Investigació en Robòtica Submarina). Ces installations sont mises à disposition des chercheurs étrangers dans le cadre du projet EUMarineRobots.
A cette occasion, ils ont répondu aux questions de nos collègues espagnoles.
TNA 2020 : Expériences à GIRONA dans les infrastructures de VICOROB

Du 2 au 6 mars, Nicolas et Mathieu ont mené des expériences dans les locaux du CIRS à Girnona.
Ces essais leur ont permis de recueillir des données réelles sur le comportement dynamique de SPARUS AUV qui seront comparées aux données du simulateur qu’ils développent afin d’améliorer leurs prévisions.
Cette action a été possible grâce à l’accès transnational (TNA) offert par le projet européen EUMarineRobots. L’objectif principal du projet EUMR est d’ouvrir les principales infrastructures nationales et régionales de recherche en robotique marine à tous les chercheurs européens, tant du monde universitaire que de l’industrie, en assurant leur utilisation optimale et leur développement conjoint afin de mettre en place une infrastructure intégrée de robotique marine de classe mondiale.
Si vous êtes un étudiant, un chercheur industriel, un universitaire ou un entrepreneur et que vous souhaitez poser votre candidature pour un TNA afin de réaliser des expériences avec le Girona500 AUV ou le Sparus II AUV, vous avez jusqu’au 15 avril 2020 pour poser votre candidature !
https://www.eumarinerobots.eu/tna-3rdcall
(traduit de https://vicorob.udg.edu/tna-experiments-in-the-vicorobs-infrastructures/)
Cosmer au GT Robotique marine et sous-marine du 28 juin 2019
Nicolas Gartner représentera la laboratoire COSMER lors du groupe de travail de robotique marine et sous-marine le 28 juin 2019 à l’ISIR. Il présentera ses travaux intitulés « Simulation de la dynamique des véhicules marins dans leur environnement avec la méthode SPH ».
Résumé : Simuler la dynamique des véhicules marins dans leur environnement présente un enjeu majeur pour vérifier l’efficacité des lois de commande dynamique, évaluer la manœuvrabilité du véhicule ou encore simuler des missions dans un environnement perturbé (plage, courant fort). En effet, ceci nécessite actuellement de mettre en place des séries d’essais coûteuses et longues. L’objectif ici est d’avoir un simulateur réaliste, qui simule l’environnement dans lequel se trouve le véhicule et qui fonctionne en quasi temps réel. Cet exposé décrira les différentes méthodes applicables pour simuler la dynamique des véhicules marins et donnera les motivations qui ont conduit à retenir une solution avec un fluide simulé sans maillage. Nous expliquerons ensuite brièvement la méthode utilisée et présenterons des expériences et les résultats obtenus jusqu’à présent.
RoboCup 2019 – 2-8 juillet


Oceans 2019 – Marseille – 17-21 juin



