
The COSMER lab participated in the IROS conference at Abu Dhabi in Oct. 2024, where Charly Péraud presented his work described in two papers:
IMU-based Monitoring of Buoy-Ballast System through Cable Dynamics Simulation
Workshop ROMADO: Cable Lobe Detection in a ROV/USV Tethered System Using IMUs and
Compliant Buoy-Ballast Equipment.


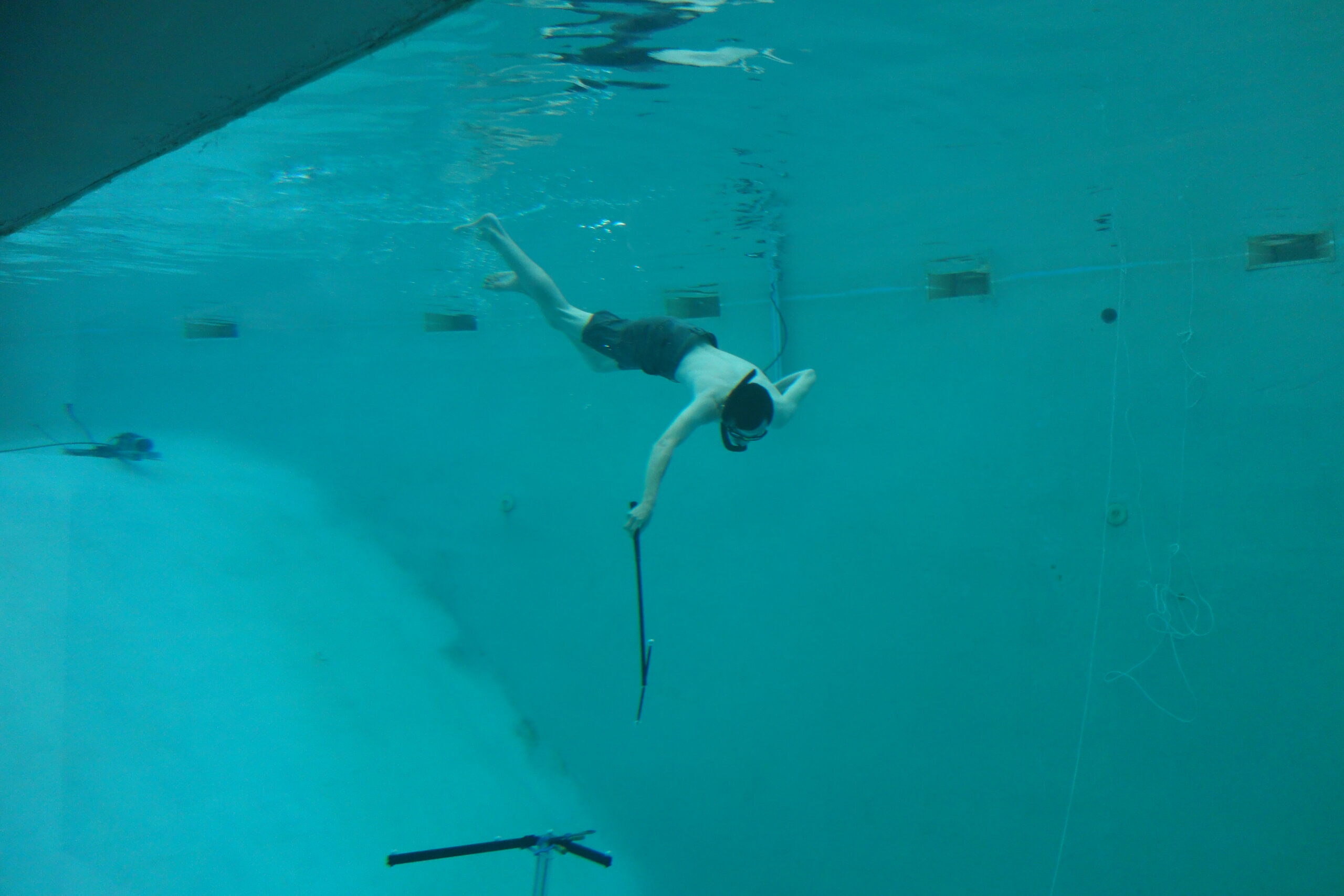
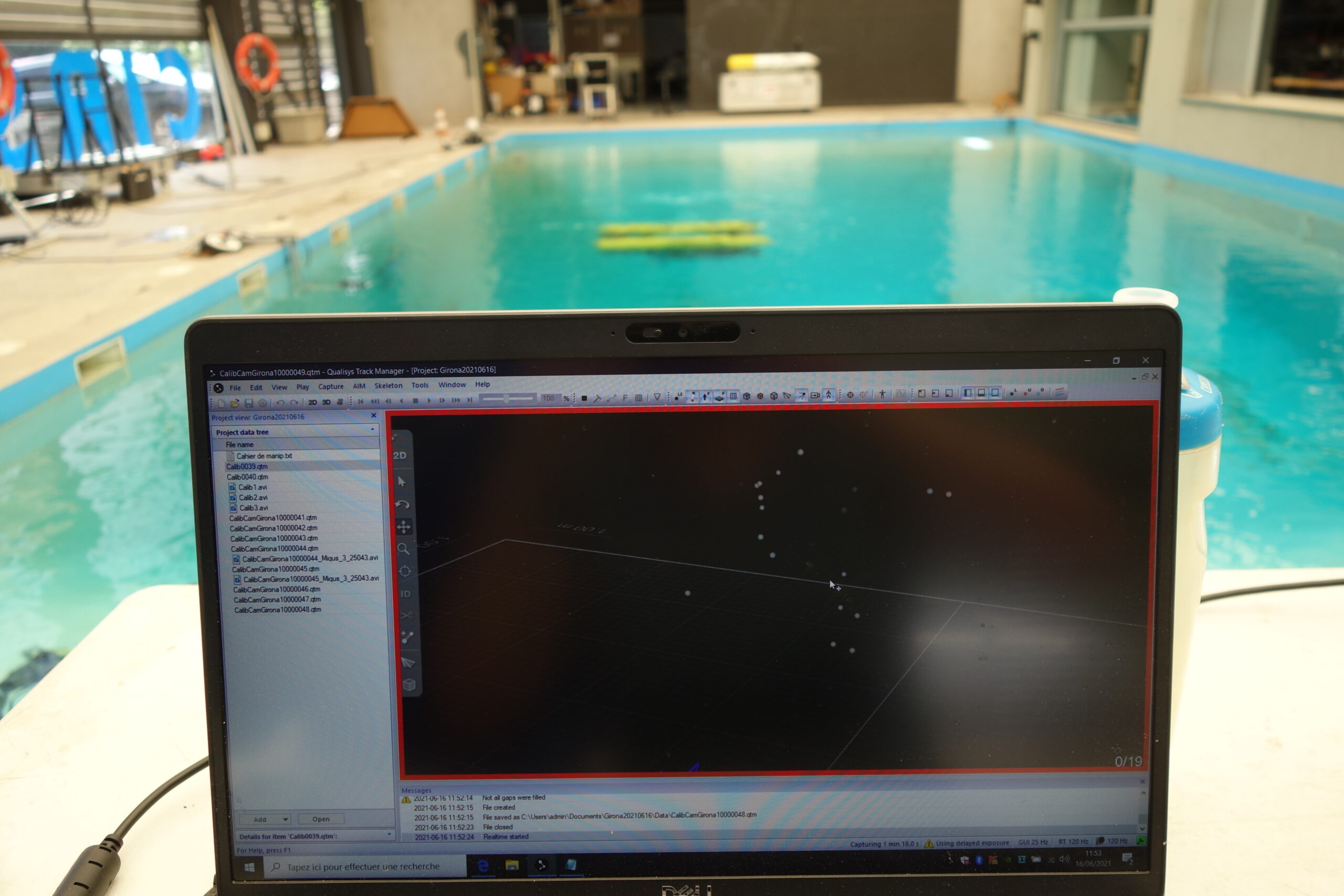
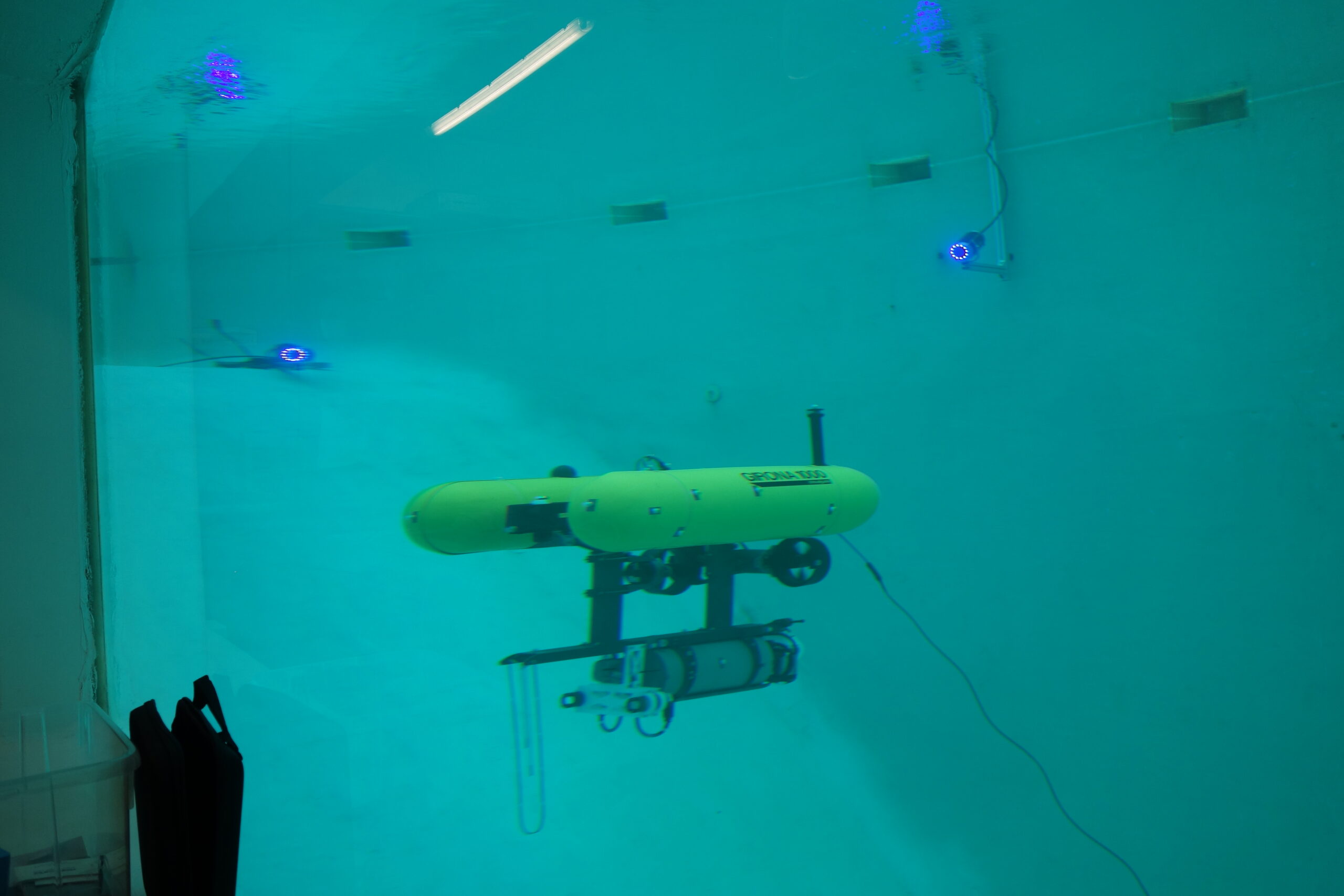

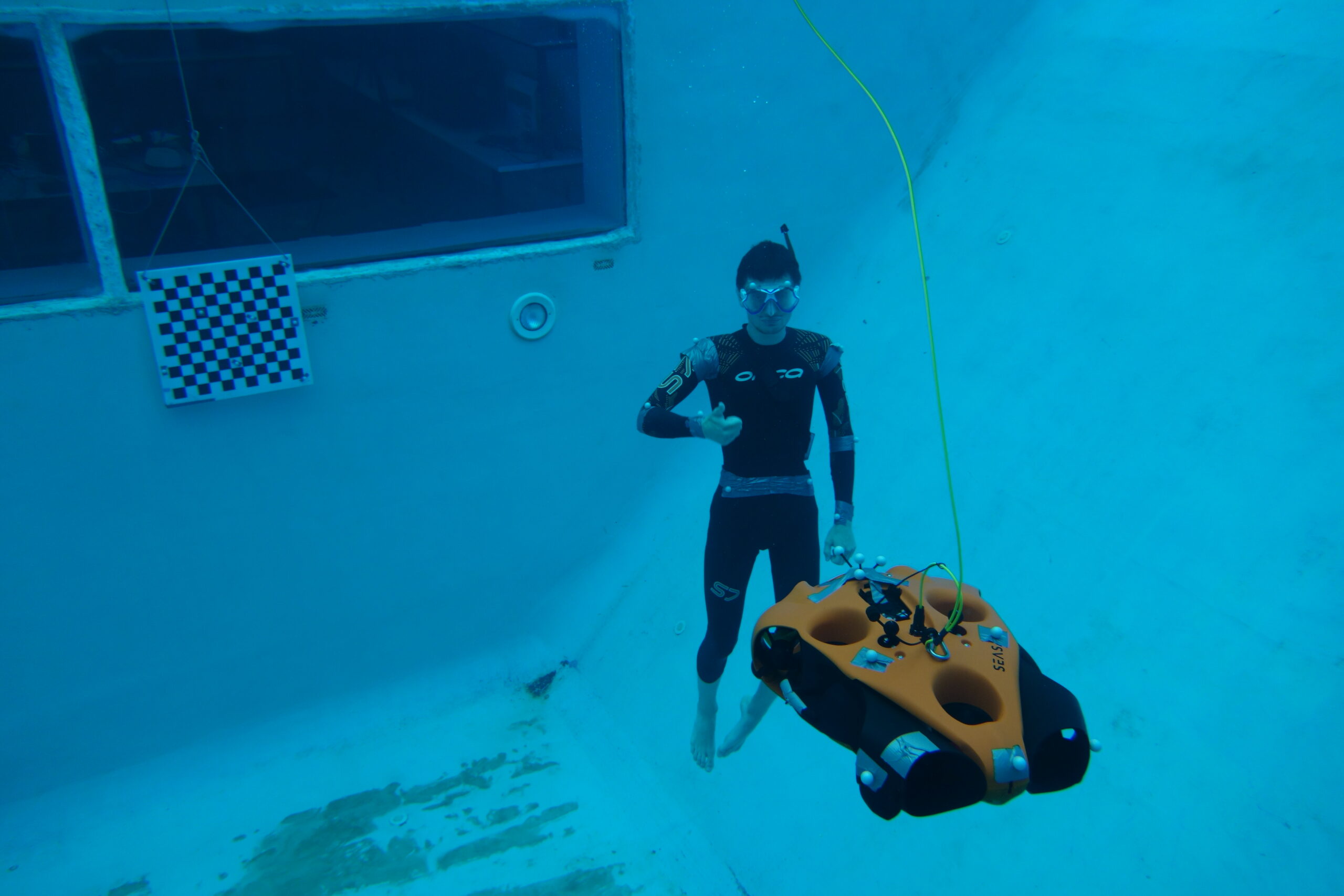

 From the 2nd to the 6th of March, a team of researchers and students of the Université de Toulon have been carrying out experiments at the facilities of the CIRS.
From the 2nd to the 6th of March, a team of researchers and students of the Université de Toulon have been carrying out experiments at the facilities of the CIRS.