Turtlebot mobile robots
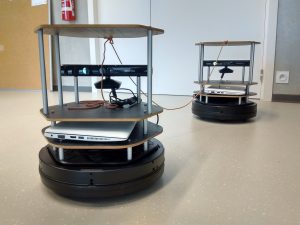
Two turtlebots composed of a kobuki mobile base and a Kinect device, run with ROS, allow carrying out experiments of mobile robotics. Simulations are conducted thanks to the gazebo environment which incorporates the ODE physical engine. These robots are used for practical work in the lecture course devoted to mobile robotics in the SYSMER program of the Seatech engineering school in order to teach to the engineering students the advantages of the ROS middleware for robotics developments. They are also used in the framework of the PhD thesis of Matheus Laranjeira, which focuses on the visual servoing of a chain of underwater robots. The figure above depicts two robots that are linked by a passive tether, where the follower robot must manage the tether length and its orientation with respect to the vertical tether plane. The objective consists of adapting visual servoing algorithms relative to terrestrial robots to underwater robots, with two BlueROV-type robots linked by a passive tether.
NAO Humanoid Robots
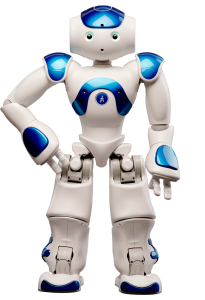
The Nao robots are small humanoid robots that are 60 cm in height, 5,5 kg in weight, originally designed by the Aldebaran-Robotics company. The last version owns 25 degrees of freedom, two cameras, ultrasound and infrared sensors, micros and speakers, an inertial unit and force sensors in the foot soles. In the framework of research activities of the COSMER lab, they allow to test algorithms of walking robots balance stabilization as well as human-machine interfaces.
 They are also used for teaching algorithms at the Institute of Technology and in the context of student projects in Seatech programs, master or reinforced licence programs. The lab owns three of them.
They are also used for teaching algorithms at the Institute of Technology and in the context of student projects in Seatech programs, master or reinforced licence programs. The lab owns three of them.