Robots mobiles Turtlebot
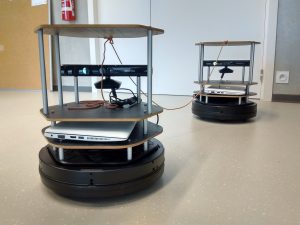
Deux turtlebots composés d’une base mobile de type kobuki et d’une kinect, exploités sous ROS, permettent la réalisation d’expérimentations de robotique mobile. Les simulations sont réalisées à l’aide de l’environnement gazebo intégrant le moteur physqique ODE. Ces robots sont utilisé en travaux pratiques dans le module de robotique terrestre du parcours SYSMER afin de faire connaître aux élèves-ingénieurs les atouts du middleware ROS pour les développements robotiques. Ils sont également mis en oeuvre dans le cadre de la thèse de Matheus Laranjeira dédiée à l’asservissement visuel d’une cordée de robots sous-marins. La figure ci-dessus présente les deux robots reliés par une laisse passive, où le robot arrière doit gérer la longueur de laisse et son orientation par rapport au plan de la laisse. L’objectif consiste à adapter les algorithmes d’asservissement visuel développés dans le cadre de la robotique terrestre à la robotique sous-marine, avec deux robots de type BlueROV reliés par une laisse passive.
Robots humanoïdes NAO
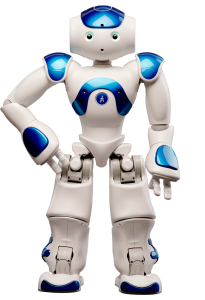
Les robots Nao sont de petits robots humanoïdes de 60 cm, pesant environ 5,5 kg développés à l’origine par la société Aldebaran-Robotics. La dernière version comporte 25 degrés de liberté, deux caméras, des capteurs ultra-sons et infra-rouge, des micros et des haut-parleurs, une centrale intertielle et des capteurs d’efforts dans les semelles. Dans le cadre des recherches du COSMER, ils permettent de tester des développements sur la stabilisation de l’équilibre des robots marcheurs ainsi que des interfaces homme-machine.
 Ils sont également utilisés pour l’apprentissage de l’algorithmique à l’IUT et dans le cadre de projets étudiants pour les parcours d’Ecole d’Ingénieur Seatech, de Master ou de Licence renforcée. Le laboratoire en possède trois.
Ils sont également utilisés pour l’apprentissage de l’algorithmique à l’IUT et dans le cadre de projets étudiants pour les parcours d’Ecole d’Ingénieur Seatech, de Master ou de Licence renforcée. Le laboratoire en possède trois.