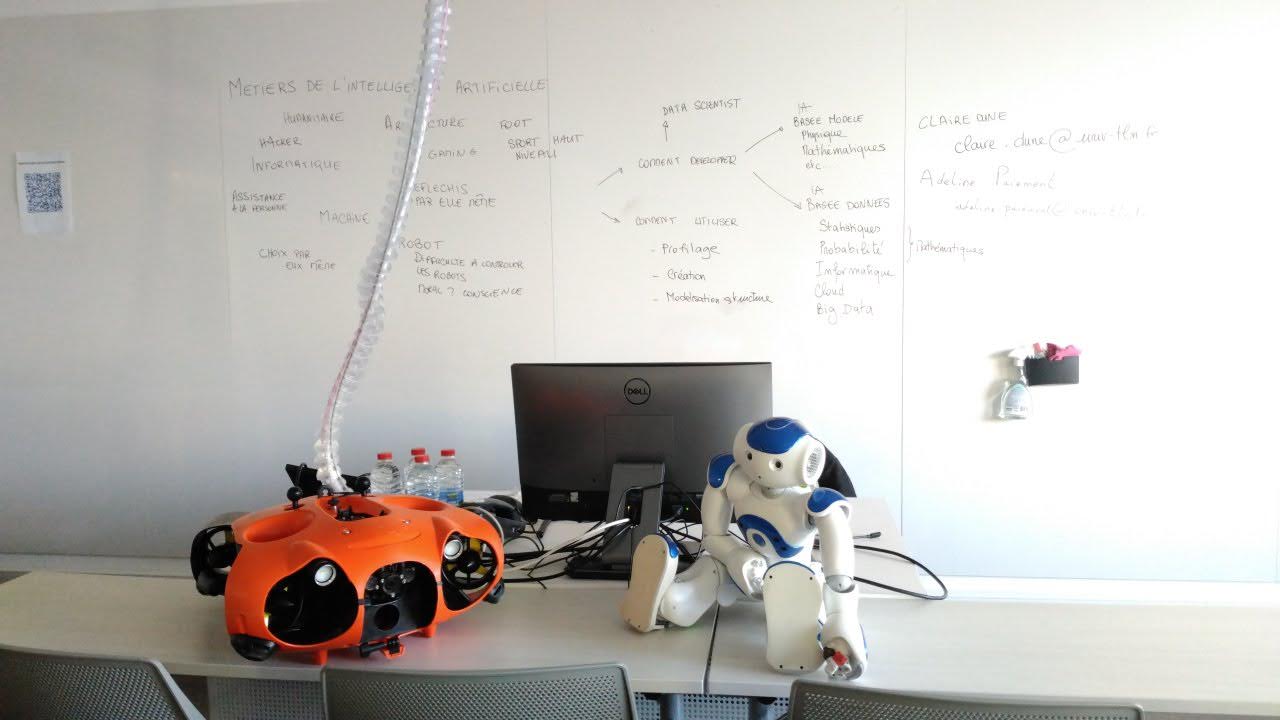
Dans le cadre des ateliers « maths en jeans » et de l’opération « faites de la science », Thierry Champion et ses élèves sont venus visiter le bassin du bâtiment X de l’Université de Toulon lors des travaux pratique du Master Erasmus Mundus, MIR portants sur le cours de « Marine Mechatronics III – Visual Servoing ». Ce cours permet aux étudiants de tester un asservissement visuel cinématique sur les mini ROV Blue-ROV du COSMER.