Le laboratoire Cosmer a participé à la Fête de la Science, édition 2024:
- à la Seyne Sur Mer, les 4 et 5 octobre
- à l’Université de Toulon le 10 octobre
- au port de Hyères, les 11 et 12 octobre



Laboratoire COSMER – RNSR 201522018X
EA 7398 – COnception de Systèmes Mécaniques et Robotiques

Le laboratoire COSMER a participé à la conférence IROS à Abu Dhabi en octobre 2024, où Charly Péraud a présenté ses travaux décrits dans deux articles :
– IMU-based Monitoring of Buoy-Ballast System through Cable Dynamics Simulation
– Workshop ROMADO: Cable Lobe Detection in a ROV/USV Tethered System Using IMUs and Compliant Buoy-Ballast Equipment.
Deux vidéos résument le contenu de ces deux articles:
– article IROS
– article workshop ROMADO
Tanny Damet, doctorante (15/10/2024) mèl : tanny-damet at etud.univ-tln.fr, tannydngar at gmail.com LinkedIn Bio – Master Robotique et Objets Connectés – Diplôme d’ingénieur en Mécatronique Encadrement Directeur de thèse : Read more →
Doctorant Financement : Région PACA (EJD) + Partenaire socio-économique Partenaire socio-économique : SeaOwl Mèl : tan-mih-cao (at) etud.univ-tln.fr Date de début de la thèse : 15 janv. 2024 Biographie Diplômé Read more →
Dans cet article Juliette présente une nouvelle version collaborative d’ORB SLAM pour localiser conjointement les agents d’une flotte de robot dans une même carte. Tous les agents sont équipé d’une caméra monoculaire, construise une même carte et se localise simultanément. Le choix des techniques réponds au besoin de robustesse à la mise en correspondance de feature du monde sous-marin mais est générique et applicable à toute flottille d’engins. Ce travail est le fruit d’une collaboration avec Andrew Comport, CR au CNRS I3S.

Doctorant Financement: Ifremer E-mail : louis-jouclas (at) ifremer.fr E-mail : louis-jouclas (at) etud.univ-tln.fr Biographie Diplômé de l’ESIEA, spécialité systèmes embarqués. Bureaux Bâtiment M, Université de Toulon, Campus La Garde. Centre Read more →
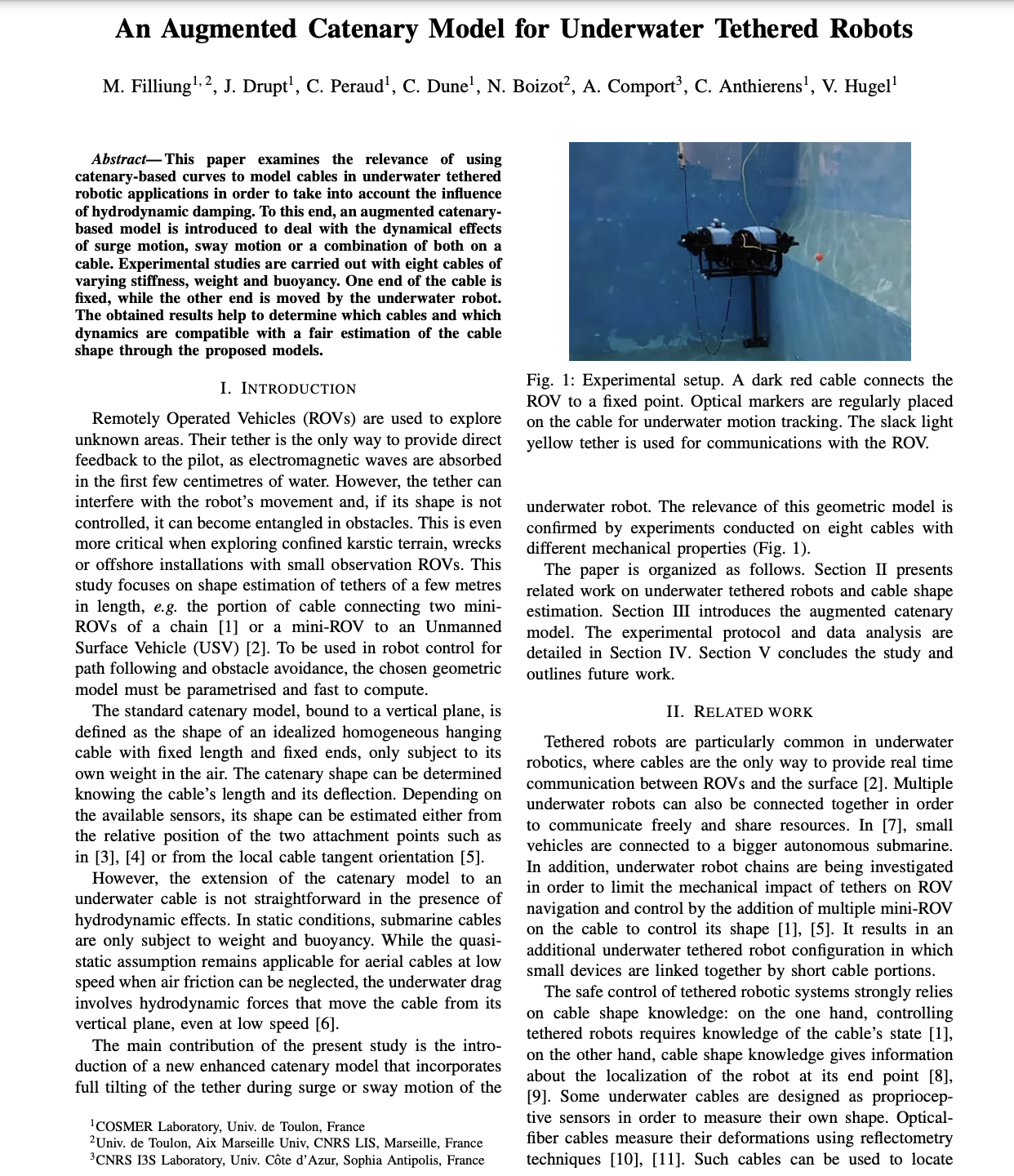
Ce travail s’inscrit dans l’axe de recherche « gestion des ombilicaux des ROVs » du laboratoire et fait suite au travail sur la modélisation des câbles immergés initié par Juliette Drupt pendant sa thèse de doctorat. C’est le résultat d’un travail collectif des doctorants du Cosmer, Martin Filliung, Juliette Drupt et Charly Peraud, et de leurs encadrants.
L’article présente l’analyse du comportement de 8 câbles de caractéristiques mécaniques différentes (raideur, elasticité, poids, flottabilité) relié à un ROV. Ils simulent le comportement d’ombilicaux porteurs de courant ou porteurs d’information. En supposant que le cable est flottant ou coulant, son modèle quasi-statique est une chaînette. Dans cette étude, nous avons évalué la persistence de ce modèle de chainette lors d’un déplacement d’une des extrémités du câble dans son plan ou hors de son plan. Cela nous a conduit à proposer l’ajout de deux degrès de liberté supplémentaires aux modèle de chaînette pour modéliser les effets des forces hydrodynamiques, en particulier les forces de trainée.
Ces travaux seront présentés au printemps, à la conférence internationale IEEE ICRA qui aura lieu à Yokohama, Japon.
Le Bureau des Études Doctorales a le plaisir de vous informer que
Madame Juliette DRUPT
Doctorante au laboratoire COSMER rattaché à l’École Doctorale 548 « Mer & Sciences » (France)
soutiendra sa thèse en vue de l’obtention du Grade de Docteur
sous la direction de
Vincent HUGEL, Professeur des Universités, Université de Toulon (France), Directeur de thèse
&
Mme Claire DUNE, Maîtresse de conférences, Université de Toulon (France), Co-encadrante de thèse
Andrew COMPORT, Chargé de recherche, CNRS (France), Co-encadrant de thèse
Discipline : Automatique, Signal, Productique, Robotique
sur le thème
« Localisation d’une cordée de robots sous-marins »
Mercredi 29 novembre 2023 à 10h00
A l’Université de Toulon – Campus La Garde – Bâtiment M – Amphi M.01
devant un jury composé de :
Résumé :
Les communications sans fil en temps réel étant impossibles sous l’eau, les véhicules sous-marins télécommandés (ROV) sont reliés à une station de surface par une liaison physique. Des travaux récents cherchent à limiter les effets mécaniques exercés par ce câble en plaçant des ROV intermédiaires le long de celui-ci pour contrôler sa forme. Cette thèse étudie à la localisation d’un tel système, nommé cordée de robots sous-marins, à l’aide de capteurs embarqués.
Il est possible de localiser un ROV par rapport à son environnement à partir de ses capteurs embarqués. Toutefois, le câble peut aussi être vu comme un atout dans la localisation de ROVs, puisque la forme 3D du câble indique directement la position de celui-ci. Deux approches complémentaires sont étudiées : la localisation proprioceptive de la cordée via l’observation du câble et la localisation extéroceptive multi-agents par rapport à l’environnement par localisation et cartographie visuelles simultanées.
Mots-clés : robotique sous-marine, objets déformables, VSLAM.
CAP-AM (ANR PRC 2023) : Evaluation et amélioration de la capabilité dimensionnelle et géométrique de processus de fabrication additive par dépôt direct multi-axes (2024-2028) Coordinateur national du projet : Sébastien Read more →
François Ducobu, Chargé de cours à l’Université de Mons (équivalent MCF HDR), que nous accueillons en tant que chercheur-invité à l’UTLN pendant deux semaines, présentera ses activités au cours d’un séminaire du laboratoire COSMER jeudi 28/09 à 15h30 en salle M205.
Outre l’étude expérimentale et numérique des procédés d’usinage à l’outil coupant, les activités de recherche de François Ducobu concernent la fabrication additive.
Dans ce domaine, les travaux ont concerné et concernent principalement :