Juliette DRUPT (oct. 2020)
Financement : bourse ministérielle
Encadrement
- Vincent HUGEL, professeur des Universités (directeur)
- Claire DUNE, Maître de Conférences à l’Université de Toulon (co-encadrement),
- Andrew Comport, Chargé de Recherche CNRS I3S (co-encadrement).
Sujet
Si les sous-marins autonomes pour la cartographie en pleine eau sont maintenant opérationnels, l’exploration de milieux confinés reste un challenge en robotique sous-marine : cenotes, grottes, épaves, mines, … L’exploration de mines immergées a fait l’objet de projets H2020 récents dont l’objectif était l’évaluation de l’état des structures afin de prévenir leur effondrement et d’estimer la quantité des stocks de minerais mais aucun de ces projets ne s’est intéressé à la gestion du cable qui relie le robot à la surface.
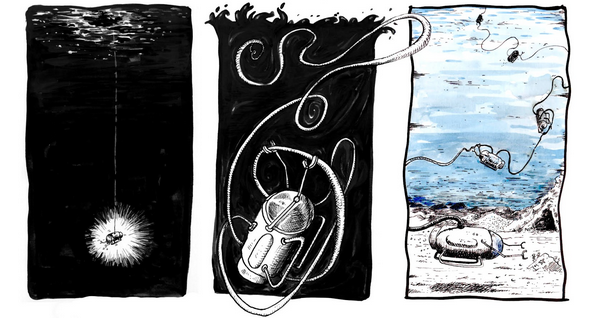
Figure 1 : 1. En robotique sous marine, les ondes électromagnétiques sont absorbées dès les premiers mètres, isolant les robots de la surface. Le seul moyen de maintenir une communication à haut débit en temps réel est d’utiliser un ombilical. 2. Ce câble, déployé sur une grande distance peut perturber la commande du robot. 3. Nous proposons d’ajouter des robots intermédiaires régulièrement sur le câble pour en contrôler la forme, c’est le concept de CORDEE DE ROBOTS.
L’exploration de milieux sous-marins confinés nécessite des temps de plongée longs et une adaptation permanente des déplacements en fonction de l’environnement découvert. Seuls les robots téléopérés de type ROV(remotely operated vehicle) réunissent ces deux compétences. En effet, les plongeurs ont des temps de plongée relativement courts et ne peuvent accéder qu’à des profondeurs limitées. Quand aux robots autonomes, sans ombilical, de type AUV (autonomous underwater vehicle), malgré les avancées en intelligence artificielle et en stockage d’énergie, ils sont encore très limités en terme de temps de plongée et de prise de décision. Les ROV bénéficient d’un apport énergétique illimité et de l’appui d’un téléopérateur qui co-analyse les données de l’enveloppe sensorielle transmise en temps réel par le câble.
Loin d’être uniquement un désavantage, le câble offre un support mécanique de secours pour récupérer le robot et peut servir de fil d’ariane pour retrouver la sortie du réseau exploré. Mais, pour déployer un système à câble en milieu confiné, il faut développer une méthode pour contrôler la position du câble pour éviter qu’il ne s’emmêle ou se coince. La gestion automatique du câble est un problème qui n’a pas ou peu été étudié jusqu’à maintenant (pour l’opération des ROV, un second opérateur supervise le déploiement du câble.).
Nous proposons de contrôler le câble en ajoutant des systèmes d’enroulement et des mini-robots intermédiaires régulièrement répartis sur la course du câble. Nous avons avons nommé ce concept CORDÉE DE ROBOTS.
Ce projet est devenu un des axes de recherche du laboratoire Cosmer et est déjà le support de deux thèses. Dans le cadre d’une première thèse [Laranjeira2017,Laranjeira2018, Laranjeira2019, Laranjeira2020], nous avons démontré qu’il est possible de contrôler une paire de robots reliés par un câble pesant en utilisant l’image de ce câble filmée par les caméras embarquées sur le système. Une seconde thèse en cours s’intéresse à la modélisation physique d’un câble et vise à développer un système de contrôle dynamique de la tension via la conception d’un enrouleur actif [Tortorici 2020].
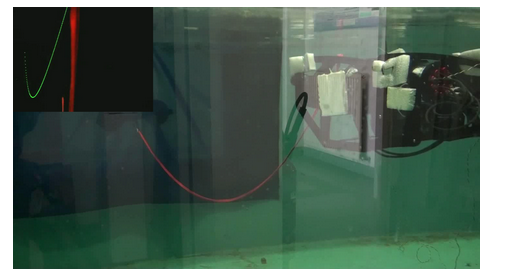
Figure 2 : Contrôle d’un robot sous marin (vue principale) à partir de l’acquisition des images de son amarre (vue en haut à gauche).
Le sujet de la thèse que nous proposons ici s’inscrit dans le prolongement de la thèse de Matheus Laranjeira. L’objectif est de contrôler une Cordée de Robots afin d’explorer et de cartographier des espaces immergés confinés :
- SLAM : Cartographie de l’environnement et estimation simultanée de la position d’un robot sous marin: le premier travail consiste à évaluer et à adapter les algorithmes de cartographie et localisation simultanée pour les environnements marins [Vidal2017, Weidner2017, Meilland2013, Mahe2019, Rahman2019]. Les techniques de localisation terrestres peuvent s’appliquer au milieu sous-marin mais requièrent des adaptations. En effet, elles sont développées pour des milieux structurés et statiques, telle que les rues d’une ville ou l’intérieur d’un bâtiment. Dans le milieu sous-marin, une grande partie de la scène est en mouvement et, dans le cas de milieu naturel, les points saillants sont moins nombreux. D’autre part, le modèle de formation des images diffère dans l’eau : des paramètres d’absorption et rétro-diffusion s’ajoute au modèle habituel de propagation des ondes lumineuses dans l’air. Cette partie s’appuiera sur une adaptation des travaux d’Andrew Comport pour les caméras aériennes.
- T-SLAM : Co-construction de la carte et estimation des paramètres de la cordée simultanées : la seconde étape est de déployer simultanément le SLAM sous-marin sur tous les modules régulièrement répartis sur la Cordée de Robot. Les capteurs (caméras, centrales inertielles, profondimètres) sont répartis le long du câble et donc contraints par sa forme. Ils permettent de co-construire une carte de l’environnement et d’estimer les paramètres d’un modèle du système complet. Les contraintes imposées par la forme du câble et sa longueur peuvent être fusionnées avec les informations acquise par les capteurs pour affiner la carte obtenue : le T-SLAM (Tethered Simultaneous Localisation and Mapping) [McGarey2017]. Cette seconde partie s’appuiera sur les résultats obtenus au laboratoire COSMER sur la modélisation d’un ombilical [Laranjeira2020, Tortorici 2020].
- Planification de trajectoires et contrôle d’une cordée de robot en milieu confiné : dans la cordée, si le robot de tête est piloté par un opérateur, en revanche les déplacements des robots intermédiaires et le câble doivent être automatisés. Il faut alors contrôler un système dynamique mixte câble-robots incluant un modèle dynamique du câble et la gestion des effets de platooning (effets accordéon dus aux retards des réactions de chaque module, équivalents aux effets observés dans les trains de véhicules). Cette partie s’appuiera sur les premiers résultats de commande d’une cordée de deux véhicules obtenus durant la thèse de Matheus Laranjeira [Laranjeira2020] et sur les cartographies réalisées dans les points 1 et 2.
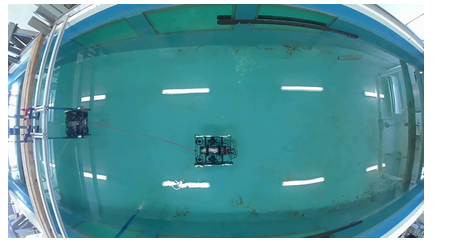
Figure 3 : Deux mini robots sous-marins BlueRov encordés dans le bassin à houle de l’Université de Toulon [Laranjeira2020]
REFERENCES
[Laranjeira2017] Matheus Laranjeira, Claire Dune, Vincent Hugel. Catenary-based visual servoing for tethered robots IEEE International Conference on Robotics and Automation (ICRA), May 2017, Singapour, France
[Laranjeira2018] Matheus Laranjeira, Claire Dune, Vincent Hugel, Local Vision-Based Tether Control for a Line of Underwater Robots, Conference IEEE IROS 2018 Madrid, Workshop on New Horizons for Underwater Intervention Missions: from Current Technologies to Future Applications.
[Laranjeira2019] Matheus Laranjeira, Claire Dune, Vincent Hugel. Embedded Visual Detection and Shape Identification of Underwater Umbilical for Vehicle Positioning OCEANS 2019 – Marseille, Jun 2019, Marseille, France. Pp.1-9
[Laranjeira2020] Matheus Laranjeira, Claire Dune, Vincent Hugel. Catenary-based visual servoing for tether shape control between underwater vehicles Ocean Engineering, Elsevier, 2020, 200, pp.107018 ⟨10.1016/j.oceaneng.2020.107018⟩
[Mahe2019] Real-time RGB-D semantic keyframe SLAM based on image segmentation learning from industrial CAD models, Howard Mahe, Denis Marraud, Andrew I. Comport, International Conference on Advanced Robotics, Dec 2019, Belo Horizonte, Brazil.
[McGarey2017] McGarey, P., MacTavish, K., Pomerleau, F., & Barfoot, T. D. (2017). TSLAM: Tethered simultaneous localization and mapping for mobile robots. The International Journal of Robotics Research, 36(12), 1363–1386. https://doi.org/10.1177/0278364917732639
[Meiland2013] 3D High Dynamic Range Dense Visual SLAM and Its Application to Real-time Object Re-lighting. Maxime Meilland, Christian Barat, Andrew I. Comport. International Symposium on Mixed and Augmented Reality, Oct 2013, Adelaide, Australia
[Rahman2019] Rahman, Sharmin & Quattrini Li, Alberto & Rekleitis, Ioannis. (2019). SVIn2: An Underwater SLAM System using Sonar, Visual, Inertial, and Depth Sensor. 1861-1868. 10.1109/IROS40897.2019.8967703.
[Tortorici 2020] Ornella Tortorici, Cédric Anthierens, Vincent Hugel, Herve Barthelemy. Towards active self-management of umbilical linking ROV and USV for safer submarine missions. IFAC-PapersOnLine, Elsevier, 2019, 52 (21), pp.265 – 270. ⟨10.1016/j.ifacol.2019.12.318⟩. ⟨hal-02428777⟩
[Vidal2017] Eduard Vidal, Juan David Hernandez, Klemen Istenic and Marc Carreras, Online View Planning for Inspecting Unexplored Underwater Structures, IEEE Robotics and Automation Letters, 2, 3, (1436), (2017).
[Weidner2017] N. Weidner, S. Rahman, A. Q. Li and I. Rekleitis, « Underwater cave mapping using stereo vision, » 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 2017, pp. 5709-5715. doi: 10.1109/ICRA.2017.7989672